波浪动力技术(Wave Energy Technology)作为海洋能源的一个重要组成部分,利用海洋波浪的周期性上下波动转化为可利用的机械能或电能,具有显著的环境和经济优势。不同于传统的风能和太阳能,波浪能具有较高的能量密度,能够提供更加稳定、持续的能源供应。此外,海洋波浪是全球范围内最为普遍且不受地区限制的能源之一,这为其在全球能源格局中的应用前景提供了巨大的潜力。
在众多波浪能转换技术中,波浪滑翔器(Wave Glider)作为一种创新型海洋设备,利用波浪能驱动滑行,其低能耗、高效率、长期稳定的特点使其成为海洋科研、环境监测、资源勘探等领域的理想平台。波浪滑翔器不仅解决了传统海洋平台在能耗、成本和效率上的局限,还为长时间、大范围的海洋数据采集与环境监测提供了全新的解决方案。
1.波浪动力技术基本原理
波浪动力技术是通过捕捉海洋波浪的机械能,将其转化为可用的电能或其他形式的能源。波浪能的来源是风吹过海洋表面时产生的波浪,这些波浪携带着巨大的能量,主要表现为波浪的垂直位移(势能)和水体的水平流动(动能)。波浪动力装置通过与波浪的相互作用,将这些能量转化为机械能或电能。
常见的波浪能转换方式包括振荡水柱装置、浮动装置、水下翼型装置以及波浪滑翔器等。振荡水柱装置利用波浪的涨落引起水柱的上下振动,带动空气流动并推动涡轮发电;浮动装置通过浮动模块的上下波动捕捉波浪的垂直能量,转化为机械能;水下翼型装置通过水下翼型在波浪中产生升力,推动设备前进;而波浪滑翔器则通过浮动部分和水下翼型之间的相互作用,依靠波浪的上下运动产生推进力,实现长时间自主滑行。
这些装置的共同点是利用波浪的垂直或水平运动来驱动机械装置,转化为可用的动力或电能。波浪动力技术的优势在于海洋波浪能量的稳定性和持续性,尤其在风力和太阳能等能源不稳定的情况下,波浪能能够提供更加可靠和稳定的能源供给。
此外,波浪能设备通常不依赖化石燃料,具有较低的碳排放和环境影响,因此被视为一种清洁、绿色的可再生能源。随着技术的不断进步,波浪动力设备的效率不断提高,应用范围也逐渐拓展,未来有望在海洋环境监测、资源勘探、发电等多个领域得到广泛应用。
2.波浪滑翔器基本原理
波浪滑翔器是一种利用波浪能驱动的海上无人移动观测平台,能够大范围、全方位和实时性地对海洋环境进行长期探索,在海洋应用研究中有着十分广阔的前景。波浪滑翔器的动力主要来源于牵引机产生的推进力,其弹簧水翼机构(HSM)将波浪能转化为前向动能,是重要的能量转换装置,对波浪滑翔器的综合性能具有重要的影响。
波浪滑翔器主要由三部分组成,分别是水面浮体船、铠装缆和牵引机,如图1所示。在波浪力的作用下,水面浮体船由波谷运动到波峰,通过铠装缆拉动水下牵引机上升,此时弹簧水翼机构在水的作用力下发生被动俯仰转动,从而产生前向推进力,反作用通过铠装缆拉动水面浮体船向前运动。而当水面浮体船由波峰运动到波谷时,牵引机依靠自身重力使向前滑翔,拉动水面浮体船向前运动,所以,无论波浪滑翔器随着波浪上升还是下降都会产生前向推进力,拉动浮体船前进。

图1 波浪滑翔器的组成
3.波浪滑翔器总体结构
波浪滑翔器由水面母船和水下牵引机通过柔性通讯铠装缆连接而成,如图2所示。其水面母船采用EVA浮体材料聚脲喷涂结构,在尽量减少自身质量的同时,保证提供较多的浮力;根据动量定理,水下牵引机采用不锈钢框架加上碳纤维翼板的结构,在水平方向产生运动分量会带动水面母船产生更大的前向位移。

图2 波浪滑翔器三维模型图
波浪滑翔器在海水表面与起伏波浪相互作用而实现前向运动,整个过程中整个过程中柔性铠装缆时而张紧时而松弛,可将波浪滑翔器看作是由柔性铠装缆连接两个质点组成。柔性铠装缆具有张紧和松弛两种状态,该两种状态将波浪动力滑翔机双体结构的运动过程分成两个过程:张紧过程和松弛过程。
通过对波浪滑翔器张紧过程受力分析,将张紧过程的受力在水平方向分解,根据动量守恒定理可以得出,质量大的质点产生的位移小于质量小的质点的产生的反向位移。因为我们希望水面母船前向位移大,水下牵引机的反向位移较小,保证双体结构产生最大的前向合位移,所以,水面母船应该具有较小的质量,水下牵引机具有较大的质量。
单纯考虑张紧过程中在水平方向分解的水动力,对于水面母船来说,其水平方向的液动阻力越小越好,即水面母船前向迎流面积较小,纵截面外轮廓水动力线形采用NACA 线形。对水下牵引机来说,其阻碍后退运动的前向水阻力越大越好,水下牵引机的前向水阻力是通过拍动翼板迎流卡位产生的,所以拍动翼板的卡位角度最好保证最大的后向水阻力。
将张紧过程的受力在垂直方向分解,为保证水面母船快速随浪起伏,水面母船应该具有较大的浮力即较大的预留排水量和较小的质量,同时水面母船具有较大的垂直迎流面积。对于水下牵引机来说,水下牵引机应该具有较小的质量,能够容易的被水面母船拉拽上升,为保证水下牵引机能够在此上升过程产生较大的前向位移,水下牵引机的拍动翼板应具有适合前向滑翔的迎流卡位,具有迎流卡位的翼板同时增加了上升液动阻力。
松弛过程的双体结构可以看作两个没有关联的质点,对水下牵引机来说,其在自身重力作用下下潜,同时由于拍动翼板的迎流卡位而产生前向滑翔,为保证水下牵引机与水面母船同波浪起伏具有相同的运动节拍,水下牵引机的质量应该不能过大也不能过小。
通过上述分解过程分析,根据极限理论假设,有如下的推断:
①水面母船质量尽量小,水下牵引机质量适量大;
②水面母船排水量尽量大,水下牵引机排水量适量大;
③水面母船前向水阻力尽量小,水下牵引机后退的水阻力尽量大。
然而,实际问题总是受到工程条件的约束,即:
①水面母船的密度不可能无限小,因为存在工程材料、工程强度和工程负载的约束作用;
②水面母船的剩余浮力不可无限大,船上表面与海水表面的距离保证在 5-8cm 范围内;
③水面母船后退的水阻力不可能无限小,水下牵引机的前向推力不可能无限大。
一、水面母船
水面母船如图3所示,主要由轻质材料船体、船体框架、太阳能电池板、电气控制舱、稳流板、超声波气象站、温盐传感器、GPS/铱星无线通讯、信标机、频闪灯、ADCP剖面流速仪和把手等组成。水面母船整体外形呈低水阻流线型,具有较小的前向水阻力。
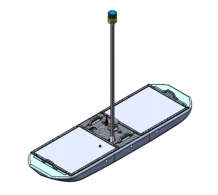
图3 波浪滑翔器水面母船三维模型示意图
二、 水下牵引机
水下牵引机主要由框架、水下推进器、罗盘组件、配重块、水翼、弹簧机构、万向节吊钩、平面翼板、保护壳和转向尾舵组成,其三维模型图如图4所示。其主体支架的结构、水翼结构和的重心和浮心位置直接影响了波浪滑翔器的波动推进效率。

图4 波浪滑翔器水下牵引机三维模型图
水下牵引机的设计需要注意以下几个关键点:
①浮心、重心、吊点和水动力中心必须在同一条竖直线内,以保证水下牵引机升降运动过程中的姿态稳定性;
②水下牵引机水翼的翼型和尺寸需要与实际海况的水流冲刷作用相适应,保证较高的滑翔效率与恰当的垂向往复运动频率;
③水翼分布间距和翼板摆动角度应与实际海况相适应,以保证较高的滑翔效率。
水下牵引机的背部中间设置有万向节吊钩,万向节吊钩的位置选择十分重要,必须保证万向节吊钩的悬吊点、水下牵引机垂向水动力学中心和水下牵引机的重心在同一条竖直直线上。
波浪滑翔机的水翼必须能够在无外力作用下自然恢复到平衡位置,以对微弱的波浪起伏运动产生快速响应,从而提升其捕获微弱波浪能源的能力,提高其波动滑行效率等。为了保证波动水翼自然状态恢复到平衡位置,可以将波动水翼制作成具有中性浮力,或者将旋转轴置于波动水翼的质心位置等。
水下牵引机的前半段安装有航向感知罗盘组件,该组件与柔性电缆的连接采用水密接插件。
水下牵引机的后半段安装有尾部转向机构,该机构与头部航向感知的连接采用水密接插件。水下牵引机尾部转向机构如图5所示,主要由舵机、舵机底壳、舵机固定、舵机上壳、磁性联轴节、平面舵板、舵机轴等组成。该机构采用陶瓷轴承、磁性联轴节内磁盘、磁性联轴节外磁盘等辅助件来传递舵机的扭矩给舵板,摩擦系数小,阻力扭矩小,大大提高了转向机构的转向效率,同时也保证了转向机构的密封性。

图5 水下牵引机尾部转向机构三维模型图
三、柔性铠装缆
柔性铠装缆如图6所示,主要由多芯铠装电缆和两组十字轴式万向节组成。

图6 柔性铠装缆三维模型图
4.波浪滑翔器海试试验
海试实验的对象为“黑珍珠”号波浪滑翔器,如图7所示。实验海域选择青岛千里岩海域,整个海试实验主要分为四个阶段分别是拷机测试阶段,设备布放阶段,实时监测阶段和设备回收阶段。拷机测试主要测试 “黑珍珠”号波浪滑翔器远程通讯与电路系统的稳定性,主要包括远程传输信息系统是否能正常回传数据和远程命令是否及时控制、电源控制系统是否能正常为蓄电池供电和太阳能电池板是否工作正常等。
设备布放阶段是将完成拷机测试阶段的“黑珍珠”号波浪滑翔器通过船舶运输到青岛千里岩附近海域,利用布放小车、布放绳和布放钩对其进行布放,在布放前在将两台波浪滑翔器上安装AIS网位移,方便在回收阶段能够对其进行定位。实时监测阶段是对布放完成的“黑珍珠”号波浪滑翔器远程进行控制,主要通过改变目标点与运行方式,为了更好的观察波浪滑翔器的速度变化。在实验中,波浪滑翔器按照10分钟的间隔,通过铱星传输波浪滑翔器的相关信息,如GPS位置、海况参数、航向信息,水下牵引机通过罗盘获取的自身运动过程中的姿态数据等。设备回收阶段根据AIS信号和GPS信号位置信息对波浪滑翔器的位置区域进行确定,船开至目标范围区域,利用船上的吊装装置进行回收。

图7 “黑珍珠”号波浪滑翔器海上航行图
海试期间的航行数据及速度情况如图8、9和10所示。截取2024年1月16日20时至2024年1月17日20时数据样本点共计140组数据,取平均可得平均速度1.05m/s。
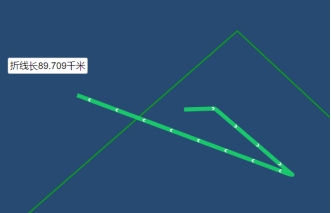
图8 轨迹图

图9 航程图

图10 速度图
本次海试过程中,波浪滑翔器自身状态稳定。波浪滑翔器续航能力持久,波浪滑翔器基本能够按照预定航向航行;波浪滑翔器俯仰和横滚的均值及波动都较小,波浪滑翔器在海试过程中姿态平稳;波浪滑翔器在海试过程中,电压呈现预期的合理周期性,稳定可靠。舱内的温度、湿度及压力都保持在一个合理的范围。仪器各参数显示波浪滑翔器的总体性能良好,是一个稳定的海面观测平台。
5.波浪滑翔器波浪动力学术成果
已发表论文
[1]桑宏强,李灿,孙秀军.波浪滑翔器纵向速度与波浪参数定量分析[J].水下无人系统学报,2018,26(01):16-22.
[2]孙秀军,王力伟,桑宏强.波浪滑翔器水下牵引机滑翔动力分析[J].水下无人系统学报,2020,28(03):252-258.
[3]桑宏强,关海鹏,孙秀军.波浪滑翔器水下牵引机抗扰动性能研究[J].水下无人系统学报,2020,28(04):376-381.
[4]孙秀军,李宗萱,杨燕,等.波浪滑翔器波浪驱动速度与海浪参数映射关系研究[J].水下无人系统学报,2020,28(05):471-479.
[5]孙秀军,刘金成,桑宏强,等.波浪滑翔器被动扑翼机构推进效率分析[J].水下无人系统学报,2021,29(03):265-271.
[6]孙秀军,马思源,李灿,等.波浪滑翔器弹簧水翼机构三维效应的分析与研究[J].船舶力学,2024,28(04):527-540.
[7]Xiujun S ,Siyuan M ,Hongqiang S , et al.Research on the propulsion performance of spring-hydrofoil mechanism of the wave glider[J].Ocean Engineering,2022,266(P2):
已授权专利
[1]孙秀军,桑宏强,李灿,等.一种用于波浪滑翔器的水下牵引机[P].山东省:CN201911237951.X,2023-11-28.
[2]刘金成,王研鸿,王力伟,等.一种走航式波浪滑翔器波浪动力转换效率测试装置[P].山东省:CN202310918956.9,2023-10-13.
[3]孙秀军,桑宏强,刘金成,等.一种波浪滑翔器波浪动力转换效率测试装置[P].山东省:CN202210164162.3,2022-06-03.