目前,海上船舶检测系统大致分为两类,一类检测系统是放置在浮标上可以长期的运行但不能移动监控范围小;另一类检测系统是放置在船只上,可以移动但受船只限制,运行时间短,并且需要耗费大量的人力、物力,不适合在海上进行长期监控。因无人监测船具有成本低、作业范围大、抗风险能力强等优点,所以利用无人船来代替人力进行海事监管、检测可疑船舶和维护海上交通秩序等方式越来越引起人们的关注。
波浪滑翔器是一种以波浪能和太阳能为前进动力的新型海洋移动观测平台,在海洋中几乎不受能源限制,同时具有成本低、续航时间长、作业范围大、抗风险能力强等优点,基于波浪滑翔器的海上船舶检测在军事侦察、海上目标跟踪、海上交通管制等任务中发挥着重要作用。
为确保其在海洋环境中实现海上船只的检测,波浪滑翔机的图像识别技术主要涉及以下关键领域:
1. 跨层融合的船舶检测模型
由于海上的船舶对象种类、尺寸不一,并且有些相对于波浪滑翔器距离较远,导致检测船舶大小差异较大,较小的目标船舶会造成一定的漏检和误检。针对这个问题,运用跨层融合的方法改进YOLOv8 模型。对于卷积神经网络来说,低层网络的分辨率高,几何细节信息表征能力强,因此更有利于小目标的提取和回归;深层特征图语义丰富但精度低,随着网络的加深,在下采样时会遗漏更多的小目标信息。因此,为了提高海上船舶小目标检测效果,在原有的20×20、40×40 和 80×80 三种尺度检测上额外增加一个检测尺度,增添一个 160×160 的检测尺度,来获取更多的船舶小目标信息,原始模型与 160×160 的特征图级联,通过 8 倍和 2 倍混合上采样的方式进行特征融合,利用远层特征信息并且预防船舶小目标的特征信息丢失,以提高船舶小目标的检测精度。
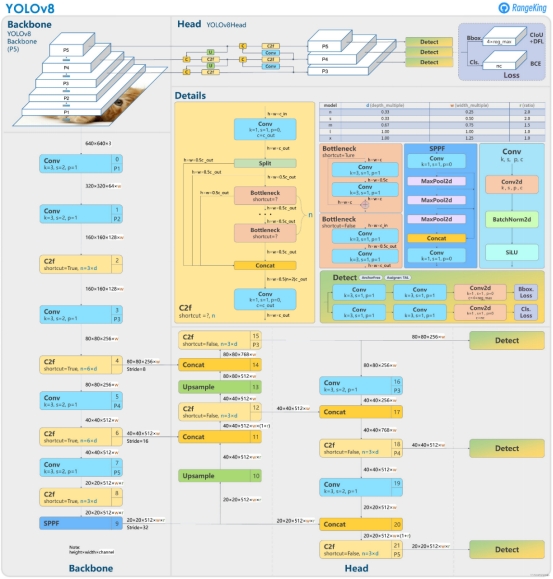
图1 总体模型网络结构图
2. 基于注意力机制的SimAM 模块
为了降低图像中的波浪反射光、船舶尾流和云层等环境噪声干扰,提高船舶目标在图像背景中的重要性,可以在YOLOv8的骨干网络部分加入SimAM注意力机制。SimAM(Similarity-based Attention Mechanism)是一种无参数的注意力机制,它通过计算特征之间的相似性来增强关键信息。这种机制结合了通道注意力(Channel Attention)和空间注意力(Spatial Attention)两者的优点,能够在不增加额外参数的情况下,更全面地平衡各神经元的重要性来进行加权。
在模块的单卷积分支上加入单个SimAM注意力模块,可以加强船舶目标在提取特征时的权重,并进一步抑制海洋环境干扰影响,从而提高模型的检测性能。SimAM的性能优于传统的通道注意力和空间注意力机制,因为它能够在推理速度方面与SE、ECA相当,优于CBAM、SRM。此外,SimAM的无参特性意味着它不会增加额外的参数,这有助于保持模型的简洁性和高效性。通过这种方式,SimAM提升了模型在目标检测任务中的性能。这种改进使得模型在处理复杂背景和环境噪声时更加有效,从而提高了船舶目标检测的准确性和鲁棒性。
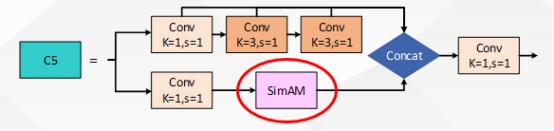
图2 SimAM模块
3. Wise-IoU Loss 算法
由于海上部分船舶形状的特殊性和小目标船舶的普遍出现,针对海上船舶桅杆区域检测不全的问题和小目标船舶检测遗漏问题,在损失函数中加入Wise-IOU,Wise-IOU通过计算锚框的离群度来定义一个动态聚焦机制(FM),该机制将小梯度增益分配给高质量锚框,使锚框回归能够专注于普通质量的锚框,同时,它将小梯度增益分配给低质量锚框,有效削弱了低质量样例对锚框回归的危害,根据距离度量构建距离注意力,放大普通质量anchor 的𝐿𝐼𝑜𝑈,降低高质量 anchor 的𝑅𝑊𝐼𝑜𝑈,在锚框与目标框重合较好的情况下降低其对中心点距离的关注;并且针对交叉熵的单调聚焦机制,构造了𝑅𝑊𝐼𝑜𝑈𝐿𝐼𝑜𝑈单调聚焦系数𝐿𝛾∗𝐼𝑜𝑈,降低简单示例对损失值的贡献;定义离群度描述 anchor 的质量,通过分阶段进行不同梯度增益分配策略,Wise-IOU能够提高模型的定位性能,特别是在处理复杂背景和小目标时,有效地解决了海上船舶桅杆区域检测不全和小目标船舶检测遗漏的问题,提高了模型的检测性能。
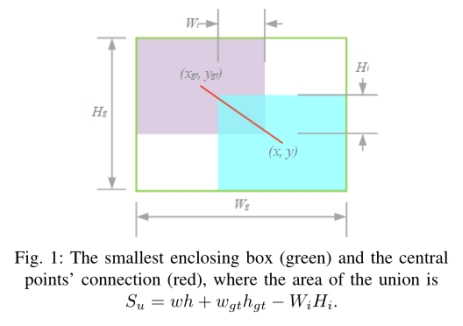
图3 Wise-IoU Loss
4.试验平台构建与海试验证
海上视觉辨识系统能够实现自动对焦,视场角达到100°,能够对海面实际场景进行清晰成像,图像处理单元负责接收目标和背景信息,通过光学系统成像到机芯上,同时生成图像视频信号,并进行图像的预处理。系统上电后,光电负载进行初始化,完成设备的状态检验。当检验无误后,开始进入实际工作模式。系统分为维护模式和工作模式,维护系统可以对系统软件进行升级、参数修订。工作状态完成设备的启动与自我检查。
进入工作模式后,将启动搜索信号,完成启动的相关配置。当前波浪滑翔器视觉发现辨识系统的主要工作模式主要有三个模式。
(1)手动模式下,面阵CCD通过对人工选取的目标进行特异性识别,并将识别结果上传至岸基控制中心。
(2)半自动化模式下,通过系统自动搜索可以自主发现目标,经过人工确认后回传至岸基控制中心。
(3)全自动模式下,系统会根据拍摄到的目标进行自主识别,通过与网络模型进行对照进而识别出目标。
海上视觉辨识系统海试验证结果如下所示:
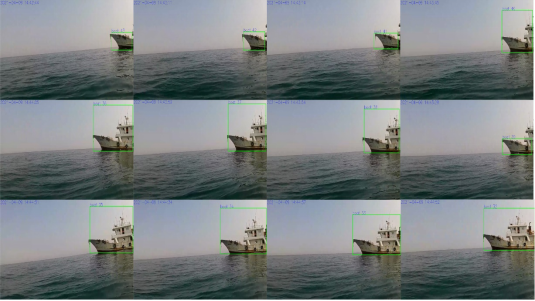
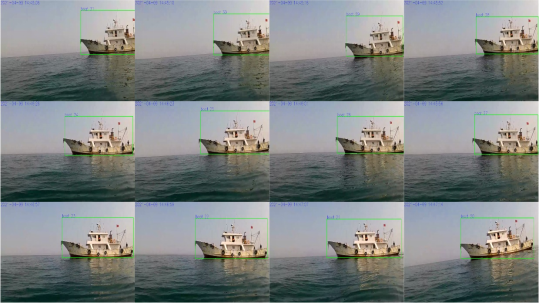
图4 视觉系统海试验证图