波浪滑翔机作为一种自然能驱动的智能海洋无人航行器,在执行远程海洋侦察、环境监测和目标跟踪等任务中展现了独特优势。与传统的海洋监测装备相比,其依托波浪和浮力驱动,能实现低能耗、长航时、大范围的自主运行,适应复杂多变的海洋环境。近年来,随着军事与民用需求的不断提升,波浪滑翔机在海洋防御、潜在威胁探测及战场态势感知等领域的战略地位日益凸显。
海洋环境的复杂性和动态性为波浪滑翔机的自主运行提出了严峻挑战,尤其是在面对未知海域中的障碍物时,其导航与避障能力直接关系到任务的成败与设备的安全。传统的避障手段如被动声呐和雷达虽能提供一定保障,但在强背景噪声、高密度障碍区域和多目标交叉环境下,其效能显著下降。因此,发展智能化、多源信息融合的避障技术,已成为提升波浪滑翔机作战能力的核心方向。
智能避障技术通过环境感知和自主决策的协同应用,为波浪滑翔机提供动态避障能力和路径优化策略,确保其在高风险海域中稳定执行任务。结合AIS系统、光学识别及实时环境建模等先进技术,智能避障不仅能显著增强波浪滑翔机的任务可靠性,还将推动其在海洋防御领域实现更广泛的应用,其关键技术包括:
1.多目标全局路径规划方法
全局路径规划是实现波浪滑翔机自主导航的关键技术之一,其目的是在给定起点、终点和现有已知障碍物的情况下,寻找一条最优路径使得波浪滑翔机能够安全、高效地完成导航任务。
针对波浪滑翔机全局路径的节能、短距离和安全等多目标权衡问题,设计多目标全局路径规划方法,以确保波浪滑翔机在不确定海洋环境中高效航行,如KS-RRT*算法。综合考虑波浪滑翔机运动学和安全域约束,建立路径安全方案,提高规划路径的安全性。此外,评估每个可行轨迹的能量成本、路径长度和安全度量,可采用TOPSIS算法解决多目标路径优化问题,通过B样条算法平滑最优路径,确定最终路径。
| |
图1 KS-RRT*算法随机抽样和节点扩展过程 | |
|
|
图2 多障碍环境中算法规划结果 | 图3 多障碍环境下算法的扩展树 |



2.基于AIS的时间戳碰撞检测方法
在动态障碍物避障过程中,为了保证波浪滑翔器的安全性,还需注意以下三个问题:(1) 动态障碍物始终处于机动过程,其航向、方位始终发生改变;(2) 动态障碍物对于波浪滑翔器的影响范围随着其航向角的变化而改变;(3) 考虑动态障碍物与波浪滑翔器的相对方位以及速度比,不可只单纯考虑两者之间的位置关系。
为了使波浪滑翔器准确避开动态障碍物,并考虑到其弱机动性,有必要根据其当前运动状态判断是否存在后续碰撞风险,因此提出了时间戳碰撞检测算法。根据动态障碍物预测模型,将波浪滑翔器的运动视为具有不确定加速度的Signer模型,利用EKF算法预测波浪滑翔器和动态障碍物在一定时间之间的运动轨迹。提出了时间戳的概念,在同一时刻记录波浪滑翔器和动态障碍物的状态信息。在同一时间戳计算波浪滑翔器与动态障碍物之间的碰撞风险指数,从而决定波浪滑翔器与动态障碍物之间是否存在后续碰撞风险。
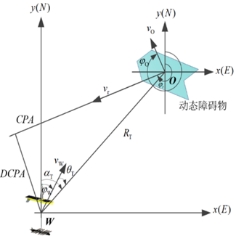
图4 相对运动模型
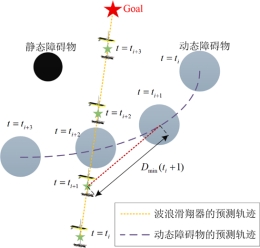
图5 时间戳碰撞检测方法
3.TCD-EAPF局部路径规划方法
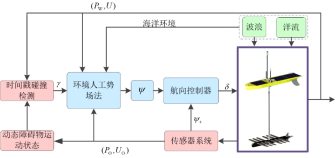
波浪滑翔机的全局路径规划旨在寻找满足距离、安全和能耗要求的最优路径,然而其在复杂海洋环境中航行时还面临着诸多挑战,如运动状态实时变化的动态障碍物和未知静态障碍物。这些因素增加了波浪滑翔机路径跟踪的复杂性,同时也影响了任务执行效率。因此除了预先确定全局路径之外,还需要根据动态海洋环境实时规划局部路径。
通过优化传统APF算法,解决了局部最小和目标不可达问题。在动态避障过程中,考虑复杂海洋环境的影响,提出EAPF算法,通过增加环境引力场,提高了波浪滑翔机在避障过程中的机动性,同时减少了环境对航行轨迹的影响。在预测动态障碍物方面,采用了不同的动态障碍物模型,并引入了TCD算法来预测波浪滑翔机与动态障碍物之间的碰撞风险,以适应波浪滑翔机的弱机动性。
|
|
图7 逃逸力组成 | 图8 EAPF算法原理 |
| |
图9 TCD-EAPF局部路径规划方法 | |


6.试验平台构建与海试验证
波浪滑翔机导航系统实验包括波浪滑翔机转弯机动性海试、航向跟踪海试、路径跟踪海试、局部路径规划海试和全局路径规划实验。同时,为了验证所建立的动力学模型与所提出的控制方法的有效性,将海试期间的海洋环境数据导入MATLAB仿真软件,进行仿真分析。通过构建波浪滑翔机试验平台以及在实际和模拟海洋环境中分别进行试验,对所建立的动力学模型与所提出的控制方法进行全面评估和验证,为波浪滑翔机进一步研究和应用提供指导。
|
|
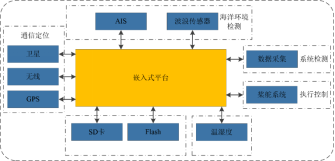
图13 波浪滑翔机试验样机 | 图14 波浪滑翔机控制系统 |
| |
图15 实际海洋环境下路径规划结果 | |
| |


7.波浪滑翔机自主导航学术成果
已发表论文:
[1] Shuai Zhang, Xiujun Sun*, Hongqiang Sang*, Ying Zhou, Peiyuan Yu. Research on path following control system of wave gliders based on maneuverability demand estimator. Ocean Engineering, 2023, 287: 115932.
[2] Shuai Zhang, Xiujun Sun, Hongqiang Sang*, Ying Zhou, Peiyuan Yu. A multi-objective path planning method for the wave glider in the complex marine environment[J]. Ocean Engineering, 2022, 264: 112481.
[3] Shuai Zhang, Xiujun Sun*, Hongqiang Sang*, Ying Zhou, Peiyuan Yu. A real-time local path planning algorithm for the wave glider based on time-stamped collision detection and improved artificial potential field[J]. Ocean Engineering, 2023, 283: 115139.