随着海洋资源的开发与利用,风浪动力无人平台作为一种新兴的海洋技术装备,在环保节能、经济效益、作业安全、技术创新、长航时作业以及环境友好等多个方面具有优势。随着人工智能和传感器技术的进步,风帆动力无人平台能够搭载先进设备,执行复杂的海洋监测和数据收集任务。此外,风帆动力无人平台的长航时自主航行能力使其成为执行长期海洋观测任务的理想选择。风帆动力无人平台对海洋生态系统的影响较小,有助于保护海洋环境,具备高航速、长航程、长航时以及高可靠性等优越能力并具备自主导航、位置保持和远程指控的功能。因此是实现绿色、智能海洋开发的重要工具。
风帆动力无人平台是利用风力直接驱动的海上无人监测平台,在海上作业时有诸多优势。首先,航行过程中对能源的需求较低,续航能力强。无人帆船不是依赖自身携带的能量进行推进,而是从利用海上丰富的风力资源直接推进,再借助光伏发电板产生足够的电力来运行整个风帆动力无人平台电气控制系统,整个过程中能源是几余的,使得无人平台在能源方面具有可持续性和自主性,能够在海上长时间连续运行。除了续航力的优势,无人帆船的负载能力强。风帆动力无人平台能够进行海上自主定位,数据实时传输,同时自身噪音小,不会影响噪声敏感的传感器工作,可以搭载如气象站,流速计,叶绿素含量监测仪,溶解氧测量仪,盐度计等多种传感器,对特定海域开展大范围海洋环境监测,可以为海气相互作用研究,海洋环流探测,海洋碳循环与温室效应,海洋污染监测,以及海洋动力预测模型校准等问题研究提供数据支撑。
风帆动力无人平台技术主要涉及以下关键领域:
1. 风帆动力无人平台结构设计
风帆动力无人平台通过风力进行自主航行,无需燃料支持,具有较高的能源利用效率。具备扬帆、折叠、旋转等多种功能,能够根据实际需求进行灵活操作和调整,适用于不同的海洋任务和环境。太阳能电池板提供电力支持,通过可再生能源充电,减少了对外部能源的依赖,延长了平台的航行时间和范围。设备配备稳向板和尾舵等稳定装置,能够有效应对海洋波浪和风浪等复杂海况,保证滑翔器的稳定性和安全性。嵌入式自动控制系统能够对风帆、桅杆等部件进行精确控制,实现自主导航和智能航行,提高了平台的自主性和适应性。
通过风帆结构设计将各个方向的风能转换成平台前进方向的动力,构建风帆转向机构和风帆折叠机构实现平台在不同风速下的效能控制,应用现代机构设计理论和现代优化方法对助航风帆实现结构、强度和刚度设计。
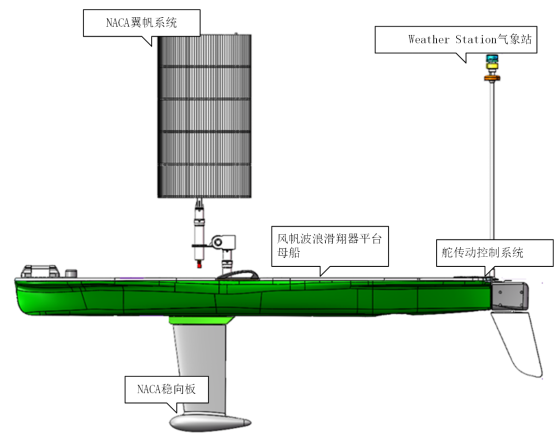
图1 风帆动力无人平台
(1)控帆与收帆机构研制
翼帆结构如图2由控帆机构、收帆机构、蜗轮蜗杆传动机构和翼帆四部分组成。
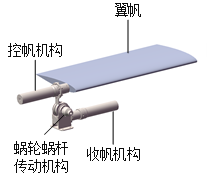
图2 控帆与收帆机构示意图
(2)龙骨结构研制
如图3所示,帆船龙骨是帆船的重要组成部分,帆船龙骨有助于保持船体结构的稳定性和倾覆性,使船只具备抵御风浪和航行的能力。
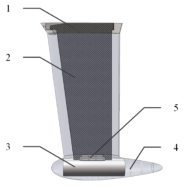
1 快插连接座 | 2 碳纤维支撑板 | 3 铅鱼配重块 |
4 NACA翼型 | 5 316连接件 |
|
图3 龙骨结构图
(3)方向舵传动机构
如图4所示,船舵是控制船舶保持当前行进方向的直接操作装置,其原理是利用舵面所受到的流体动力来控制船舶行进方向。尾舵结构主要由舵机、舵机外壳、舵机固定、舵机轴、舵板等组成。
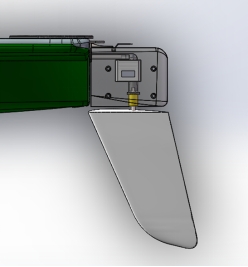
图4 方向舵传动机构
风帆动力无人平台能够利用海风实现长久续航,可以开展海气界面大范围、长时序的数据监测。其中,路径规划是风帆动力无人平台技术研究的核心问题,不同的航路规划会影响风帆动力无人平台的续航能力和航行安全性,基于风帆动力无人平台获取的环境信息,开展风帆动力无人平台的长航时路径规划研究具有重要意义。
对于风帆动力无人平台系统的路径规划方法,以每公里为边界划分为全局与局部路径规划。区分的意义在于:一是当风帆系统观测到随机或动态障碍物时,局部路径规划可以快速完成对目标的避障;二是提高总体路径规划效率,避免全局路径的重复规划。因此,本方案提出的局部路径规划算法具有路径平滑和便于实时控制等优点,全局路径规划算法具有生成多子节点和路径最优性等优点。风帆系统路径规划流程如图5所示。
基于传统A*算法和运动学约束提出了一种权重启发 A*算法。权重启发 A*算法的总体代价函数包括移动代价函数、估计成本函数和航速代价函数权重启发 A*算法通过设定避障距离阈值提高了路径安全性,通过减少无用搜索方向提高了路径搜索效率。
再次,基于传统人工势场算法和运动学约束提出了一种风人工势场(WindyArtificial Potential Field,WAPF)算法。通过改进引力与斥力函数,WAPF 算法克服了原算法目标点不可达和碰撞障碍物的缺陷。通过引入风势场,WAPF 算法在一定环境下克服了原算法容易陷入局部最小的缺陷。
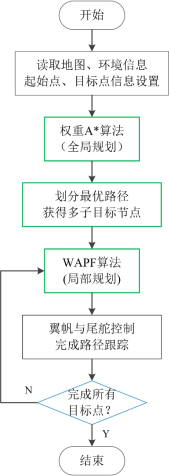
图5 路径规划流程图
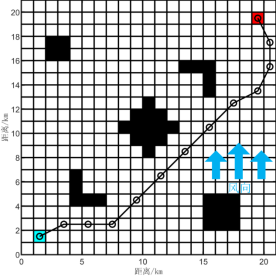
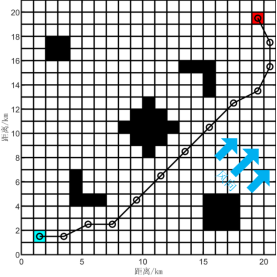
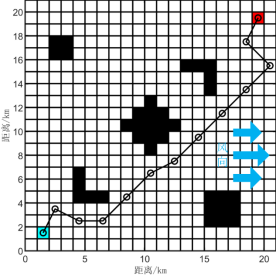
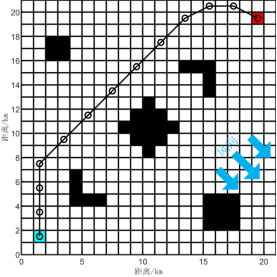
(c) 90º风场 (d) 135º风场
图6 权重启发A*算法规划路径
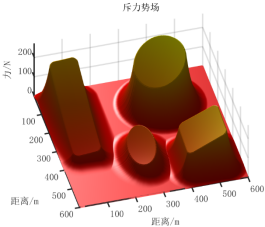

(a) 斥力势场 (b) 引力势场
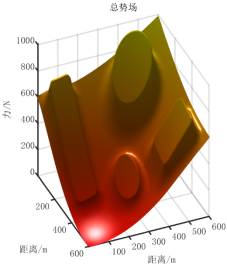
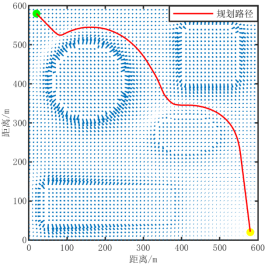
(c) 总势场 (d) 梯度路径
图7 改进人工势场算法
3. 风帆动力无人平台帆舵耦合控制
由于在巡航工况下受到海风、海浪等海洋环境的干扰作用,使风帆动力无人平台产生偏航现象,影响了风帆动力无人平台在巡航工况下基于最大航向推力运行时的稳定性与经济性。因此,航向稳定性成为了风帆动力无人平台正常运行时的重要评价指标。帆舵耦合航向控制是指通过同时控制船舶的帆和舵来实现航向控制。在不同风势场下,帆舵耦合控制系统需要采取不同的航向就控制策略来适应不同的条件。
风势场通常分为静态风势场、动态风势场、不均匀风势场和涡旋风势场四种。在船舶航行过程中我们通常研究在静态风势场和动态风势场下的航向控制。静态风势场(Steady Wind Field):在时间和空间上保持稳定不变的风势场。风速和风向保持恒定,不发生突然的变化。这是一种理想化的假设条件。如图8所示为帆舵耦合航向控制在静态风势场下的控制算法。
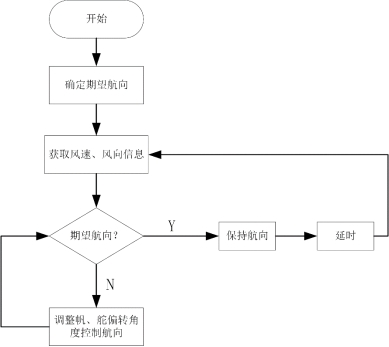
图8 静态风势场下的帆舵耦合航向控制
船舶开始行驶,首先确定船舶需要保持的目标航向,接着根据气象站感知风势场的变化,获取风速、风向等环境参数并进行预处理,其次将处理好的数据与期望航向进行对比,若达到期望航向,则保持航向,延时3s后再次感知风势场的变化,将获取到的数据再次与期望航向进行对比。若未达到期望航向,则可以使用预先确定的表格或函数来映射风速和风向到帆和舵的角度,通过调整帆的设置角度和舵的偏转角度来控制船舶的航向,将调整后的航向再次与期望航向进行对比调整。
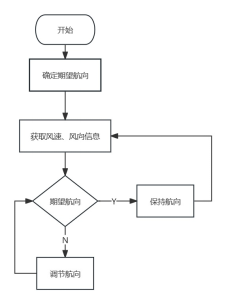
图9 动态风势场下的帆舵耦合航向控制
动态风势场是指风速和风向随时间、空间变化的风势场。在动态风势场中,风的强度和方向会发生变化,可以是缓慢的、逐渐的或突然的变化。动态风势场对船舶航向控制具有挑战性,因为船舶需要及时调整帆和舵的角度来适应风势的变化,以维持所需的航向。如果未能适应动态风势场,船舶可能会偏离目标航向或受到不稳定的航向摇摆。如图9所示为帆舵耦合航向控制在动态风势场下的控制算法。
由于风况的不同,风帆动力无人平台受到风帆航向推力、横向侧推力和转艏力矩的影响。这三者使风帆动力无人平台期望航向与实际航向存在一定偏差,导致实际航向逐渐偏离预定轨迹甚至无法保持航向。因此,当实际航向与期望航向出现偏差时,应及时调整帆和舵的设置以调整航向直至实际航向与期望航向保持一致。在上述过程中,帆舵耦合的自动控制与操作具有很高的要求:在风帆动力无人平台定向行驶时,若出现偏离预定航向状况能够立刻自动修正以保证其直线航行。当风帆动力无人平台确定航向后能够自动调整帆和舵的设置以维持该无人系统航向稳定性。基于以上要求,这里选择鲁棒性好、算法简单、可靠性和稳定性好的IAMPC航向控制系统,如图10所示。其中 是通过风帆动力无人平台搭载的导航控制系统提供,实时变化。
是通过风帆动力无人平台搭载的导航控制系统提供,实时变化。 是通过
是通过 对时间求导得出。MPC算法是处理实时航向跟踪控制问题的主要航向控制算法。
对时间求导得出。MPC算法是处理实时航向跟踪控制问题的主要航向控制算法。 和
和 为PID控制器的输出,分别为期望舵角和期望帆角。
为PID控制器的输出,分别为期望舵角和期望帆角。
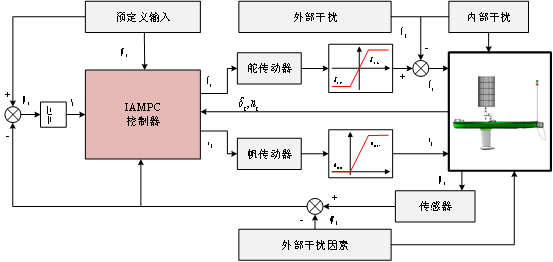
图10 帆舵耦合MPC控制系统
4. 风帆动力无人平台构建与海试
通过构建风帆动力无人平台以及在实际海洋环境中分别进行试验,对所提出的控制方法进行全面评估和验证,为风帆动力无人平台进一步研究和应用提供指导。我们在中国青岛近海进行了航向跟踪控制实验,本次实验规定全程开启风帆,转角限制在0°到300°之间,控制输入给波浪滑翔器的航向信号为阶跃信号。设定8分钟回传一次数据,如图11与图12为海试航行轨迹和数据参数。
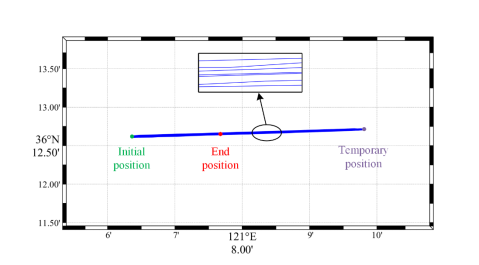
图11 海洋试验路径
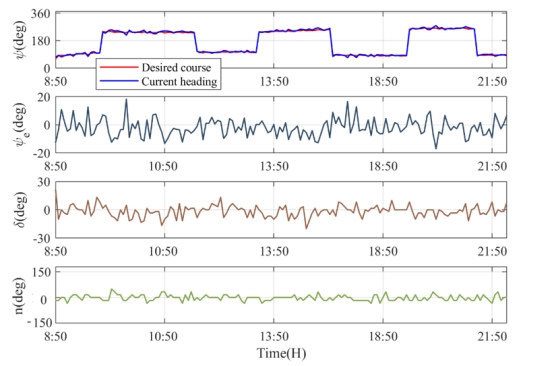
图12 海洋试验数据
从数据参数中可以明显看到,航向跟踪的误差小,说明帆舵耦合控制器能够很好的适应开启风帆后的控制。从试验数据中可以看出,这满足了我们的设计目标,也验证了控制器的有效性和鲁棒性。
图13 海洋试验照片

图14 海洋试验照片