
1. 团队名称:海洋机器人技术与装备
2. 研究团队成员
序号 | 姓名 | 职称/职务/人才称号等 | 研究领域方向等 | 个人主页 |
1 | 何波 | 教授 | 水下机器人系统设计、导航控制技术、自主观测技术等 |
|
2 | 沈钺 | 副教授 | 水下机器人导航、控制技术、海洋探测传感器以及机器学习算法 |
|
3 | 年睿 | 副教授 | 海洋观测装备与人工智能海洋学领域研究,涉及水下航行器及海洋传感器剖面观测的自主性与智能化、海洋涡旋可预报性研究 |
|
4 | 李光亮 | 副教授 | 强化学习,机器人自主控制,人机交互等 |
|
5 | 荣生辉 | 副教授 | 图像处理、深度学习、边缘计算和嵌入式等方向 |
|
6 | 冯晨 | 讲师 | 时间序列处理,复杂网络和复杂系统,机器学习,以及自主潜水器的故障检测等 |
|
7 | 秦平 | 讲师 | 水下机器人系统设计、水下图像处理等 |
|
8 | 沙启鑫 | 高级实验师 | 水下机器人的模拟仿真和软件系统研发 |
|
9 | 高强 | 实验师 |
|
|
3. 研究情况简介
本研究团队主要成员多年来致力于水下机器人导航、控制技术,海洋探测传感器以及机器学习算法方面的研究,并积累了深厚科研基础,特别是AUV SLAM研究在国内有较强的影响;在基于数据驱动技术的AUV系统领域,引领国内国际新一代AUV技术研发。
团队目前有教师9人,其中教授1人、副教授4人、讲师2人、实验师2人,团队成员对与海洋机器人系统和设备及水下信号处理有关的理论和技术手段有着较深刻的认识,拥有丰富的研究经验。
研究团队持续承担国家重点研发计划项目、863主题项目、军科委项目、科技部国际合作项目、国家自然基金、国家实验室项目等若干项。发表学术论文200余篇,获得专利授权50余项,软件登记40余项。
4. 团队成果
序号 | 作者 | 论文/专著/专利/奖励 名称和出处 | 成果 获得时间和级别 | 影响因子(或可体现影响力的指标) | 简介(体现成果水平的有关说明) |
1 | Hao Ju, Rongshun Juan, Randy Gomez, Keisuke Nakamura & Guangliang Li | Transferring policy of deep reinforcement learning from simulation to reality for robotics. Nature Machine Intelligence. | 14 December 2022;SCI 1区 | 25.898 | 本文提出了最先进的模拟-现实转移强化学习方法,这些方法受到自然界转移学习的启发,如提取任务间的共同特征,丰富训练经验,多任务学习,持续学习和快速学习。 |
2 | Jia Guo; Dongyu Li; Bo He; Shuzhi Sam Ge | An Intelligent Collaborative System for Robot Dynamics. IEEE Transactions on Cybernetics. | 19 April 2022; SCI 1区 | 19.118 | 本文提出了一个由欧拉-拉格朗日方程控制的机器人导航和控制(CNaC)的智能协作系统,有效地实现了高精度导航性能。 |
3 | Jia Guo; Dongyu Li; Bo He | Intelligent Collaborative Navigation and Control for AUV Tracking. IEEE Transactions on Industrial Informatics. | 14 May 2020; SCI 1区 | 11.648 | 本文提出了智能协同导航与控制(CNaC),提升了跟踪精度。 |
4 | Jia Guo; Bo He | Improved iSAM based on flexible re-linearization threshold and error learning model for AUV in large scale areas. IEEE Transactions on Intelligent Transportation Systems. | 20 July 2020; SCI 1区 | 9.551 | 本文提出了一种改进的增量平滑和映射(iSAM),它将灵活的再线性化阈值与误差学习模型相结合,提高了自主水下航行器(AUV)的导航效率和准确性 |
5 | Guanzhong Chen; Yue Shen; Yixiao Zhang; Wenfeng Zhang; Dianrui Wang; Bo He | 2D multi-area coverage path planning using L-SHADE in simulated ocean survey. Applied Soft Computing | November 2021; SCI 2区 | 8.263 | 本文提出了一种基于成功历史的自适应差分进化变体与线性种群大小减少(L-SHADE)的新路径规划方法,提高了多区域覆盖路径规划的效率和稳定性。 |
6 | Shuang Gao; Bo He; Xin Zhang; Junhe Wan; Xiaokai Mu; Tianhong Yan | Cruise Speed Estimation Strategy Based on Multiple Fuzzy Logic and Extended State Observer for Low-Cost AUV. IEEE Transactions on Instrumentation and Measurement. | 02 November 2020; SCI 2区 | 5.332 | 本文介绍了在复杂的洋流影响和缺乏关键导航传感器的情况下,低成本自主水下航行器的有效巡航速度估计策略,提升了测量精度的鲁棒性。 |
7 | Rui Nian; Xue Geng; Zhengguang Zhang; Minghan Yuan; Zhen Fu; Hengfu Xu; Hua Yang; Qi Lai; Hui He; Chi Wei Su; Lina Zang; Qiang Yuan and Bo He | Toward Exploring Topographic Effects on Evolution and Propagation of Ocean Mesoscale Eddies Through Life Cycle Across Izu-Ogasawara Ridge in Northwestern Pacific Ocean. Frontiers in Marine Science | 08 February 2022; SCI 2区 | 5.247 | 设计了一系列沿时间-频率域的相关步骤,以追溯中尺度涡流在不同的起源、位置、寿命、极性、完全或部分经过海脊的轨迹,并促进其生命周期的三个阶段,即与海脊相互作用之前、期间和之后统计的标准化。 |
8 | Yan Song; Bo He; Peng Liu | Real-Time Object Detection for AUVs Using Self-Cascaded Convolutional Neural Networks. IEEE Journal of Oceanic Engineering. | 05 December 2019; SCI 2区 | 3.883 | 本文介绍了一种使用侧扫声纳(SSS)和车载图形处理单元(GPU)的自动实时物体检测方法,提升了实时物体检测的鲁棒性 |
5 .相关研究成果展示
 海试现场图
海试现场图 海试现场图
海试现场图 针对研制海洋仪器设备开展海试现场图
针对研制海洋仪器设备开展海试现场图 针对研制海洋仪器设备开展海试现场图
针对研制海洋仪器设备开展海试现场图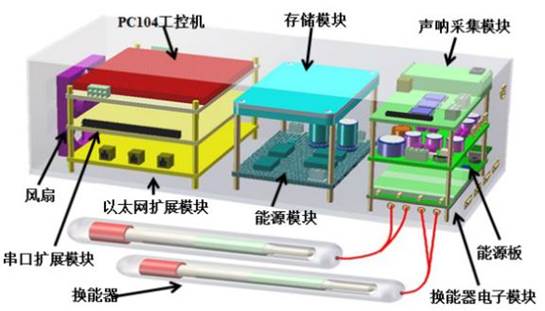 现有的自航式海底测绘系统研究成果
现有的自航式海底测绘系统研究成果 现有的自航式海底测绘系统研究成果
现有的自航式海底测绘系统研究成果 研制仪器总装与对接及五自由度开架AUV平台
研制仪器总装与对接及五自由度开架AUV平台 研制仪器总装与对接及五自由度开架AUV平台
研制仪器总装与对接及五自由度开架AUV平台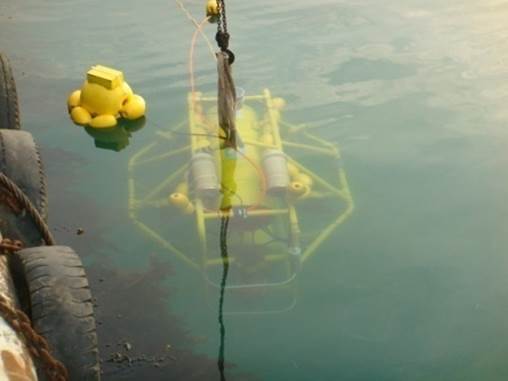 水下机器人
水下机器人 水下机器人
水下机器人 水下机器人展示图
水下机器人展示图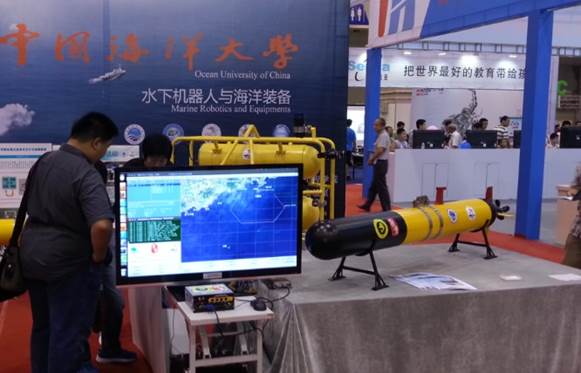 水下机器人展示图
水下机器人展示图