一、引言
波浪滑翔器是一种新型的海上无人航行器,它具有续航时间长,水声静默性好,航行自主可控等优点为探索更多的海洋信息,波浪滑翔器需要搭载各种水下设备,水下设备的增加对波浪滑翔器的速度以及姿态造成一定的影响。因此,为减小搭载设备对波浪滑翔器速度以姿态影响,对搭载设备的减阻是需要迫切解决的难题。针对波浪滑翔器声通机载荷减阻问题,设计水声通信机导流罩,提高波浪滑翔器的速度。
二、水声通信机减阻效果及分析
波浪滑翔器在实际应用中通常有直线走航式和虚拟锚泊式两种运动模式。对两种运动状态下导流罩的减阻效果进行仿真,不同导流罩轴长比在直线走航状态下的升力系数与阻力系数如图1所示。随着导流罩轴长比的增加,升力系数和阻力系数逐渐减小。
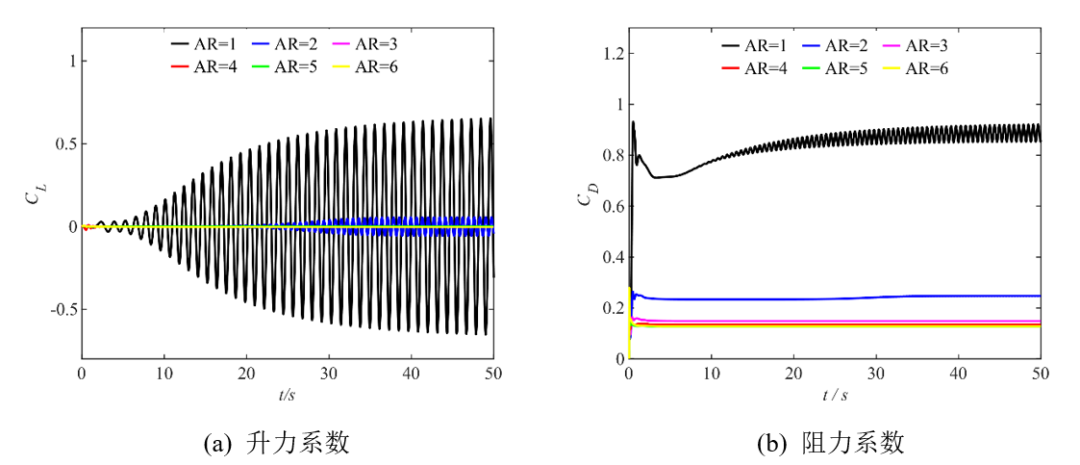
图1 不同轴长比升力系数、阻力系数
在实际作业过程中波浪滑翔器作为海上通信网关虚拟锚泊在某点接收海底节点信号时,会按照半径为40-100米的圆形轨迹航行。受到海况的影响,波浪滑翔器的实际航向与期望航向会有偏差,此时舵机通过程序控制舵板实现航向的修正,修正角度大概在40°左右。虚拟锚泊状态下,导流罩的阻力如图2所示。导流罩前轴比为时减阻效果最好,阻力为5.49N,减阻率为54%。
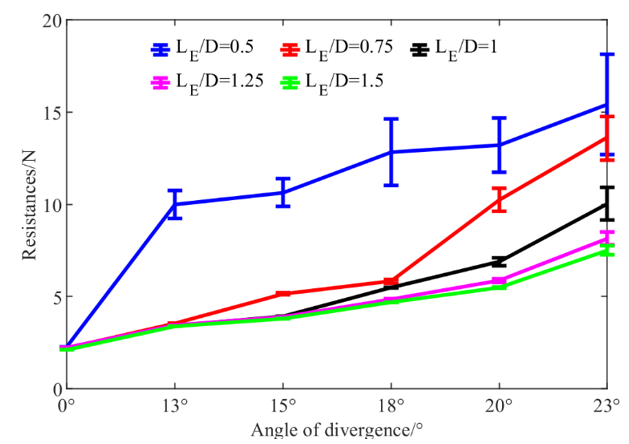
图2 不同形状在不同偏转角阻力幅值
图3为5种类型分别在偏转角为13°,15°,18°,20°时的涡量图,随着导流罩前半长轴的增加,导流效果越好。
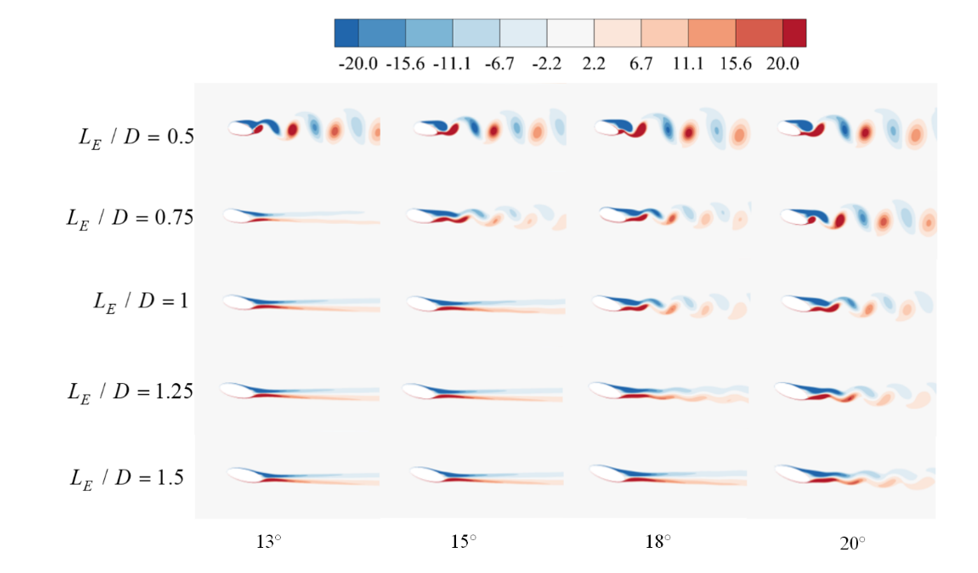
图3 不同类型导流在不同的偏转角涡量图
三、海试
为验证导流罩的减阻效果,在青岛海域对波浪滑翔器进行试验,两台波浪滑翔器分别无导流罩的声通机和有导流罩声通机做直线走航式和虚拟锚泊两种运行状态。将搭载原始模型和搭载导流罩轴长比为3的波浪滑翔器运行速度进行速度分布概率统计,每个区间速度概率如图4所示。搭载原始模型时,波浪滑翔器的速度分布主峰值为0.25m/s~0.3m/s,加装椭圆导流罩后,波浪滑翔器搭载轴长比为3导流罩时,速度分布主峰值为0.35m/s~0.4m/s。研究表明优化导流罩外形增加波浪滑翔器获得高速运行的概率。
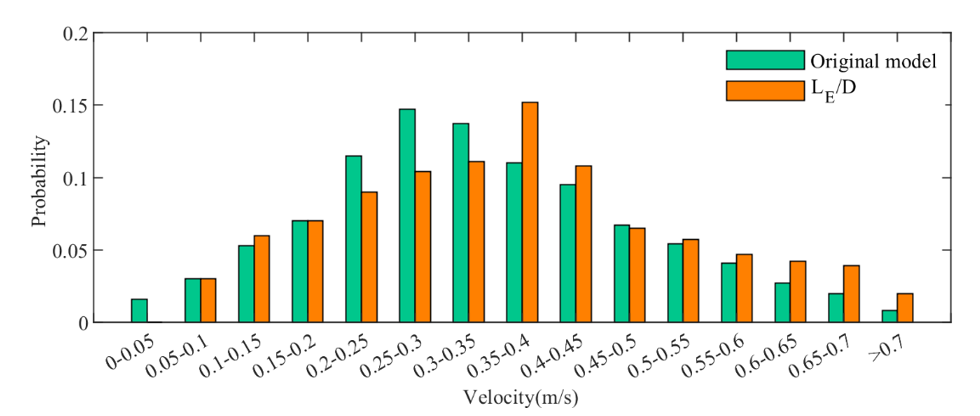
图4 不同导流罩外形下波浪滑翔器速度概率