波浪滑翔机是一型利用波浪能驱动和太阳能供电的无人自主航行器,搭载拖曳式水听器或声学阵列可实现外海大洋长时间的海洋环境实况观测和动态目标实时探测。声信号作为水下信息传输的唯一有效载体,在海洋观探测领域有着不可替代的作用。
声学辨识技术,是一种利用声呐接受到的被动目标辐射噪声、主动目标回波等传感器信息,提取目标特征,感知或识别目标类型的技术。声学辨识技术是当前非视觉检测和定位水下或水面物体方法的基础,在国防科工、水产养殖、生态保护、资源勘探和远洋海运等领域具有非常重要的实际应用价值。在建设海洋强国的时代大背景下,国家对波浪滑翔机等无人移动平台的预警监测能力提出了全新要求,就目前的军事应用和民事需求来看,声学辨识系统已经成为常态化海洋观探测平台的重要组成部分。随着海洋探测需求的增加和技术的进步,声学辨识技术将朝着更高精度、更强实时性和更高智能化的方向发展,成为海洋探测和水下作战中的重要关键手段之一。
面向南海搜反潜体系前端预警和海洋哺乳动物调查等典型应用,波浪滑翔机的声学辨识技术主要涉及以下关键领域:
1.波浪滑翔机海洋环境噪声观测系统
波浪滑翔机是一种新型海洋观测工具,具有成本低、效率高的优势,特别适合长期水下环境噪声观测。由于波浪滑翔机依靠波浪进行驱动,依靠太阳能进行平台供电,且平台航行自噪声较小,因此适合用于水下环境噪声的长期观测。为了开展基于波浪滑翔机的海洋环境噪声观测工作,设计一种波浪滑翔机海洋环境噪声观测系统,如图1所示,包含水声采集系统以及适配的水声数据冗余存储方案,能实现声学数据采集存储、数据卫星回传和远程控制等功能,系统总体电气工作流程。其中,水声采集系统具有低功耗、稳定性高等优点,水声采集电路构成;水声数据冗余存储方案具有存储灵活,数据保障等优点。海上试验结果表明,波浪滑翔机海洋环境噪声观测系统具有实用性高、续航时间长与采集存储方便等特点,能够较好地完成海洋环境噪声观测任务,具有较好的应用前景。
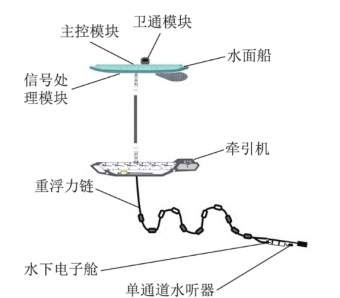
图1 波浪滑翔机海洋环境噪声观测系统组成示意图
2.基于单通道水听器的线谱检测
线谱是水声目标探测和识别的关键信息,而在实际海洋环境中,由于海洋环境的强噪声背景干扰以及舰艇目标的减振降噪技术提升,线谱越来越难以检测。
针对传统时域平均方法相干增益获取不充分的问题,提出了基于ABDHM错位相干平均法的线谱检测方法。此方法错位相干平均时的前五组错位标记元素为A、B、D、H、M,故命名为ABDHM错位相干平均法。该方法首先考虑时域样本的噪声时间相关半径,并以此为依据进行分段,其次按特殊规则的错位方式获得多组待时域平均的样本,然后通过频率搜索保证各组时域平均样本同相叠加,同时对时域平均后的新样本做功率谱估计,搜寻到某个频率的谱估计取极大值时即可获取该频率下的最大相干增益。
综合所有LOFAR谱图来看, ABDHM错位相干平均法(14次错位)结合CAPSE法和三点内插法在实际海洋环境噪声干扰下,相较于传统方法能对目标船只的线谱进行更加有效的检测, 并且两种方法的LOFAR谱图背景噪声基底较传统方法大幅下降,提升了目标线谱信号信噪比。

图2 海试回传LOFAR 谱图(片段)
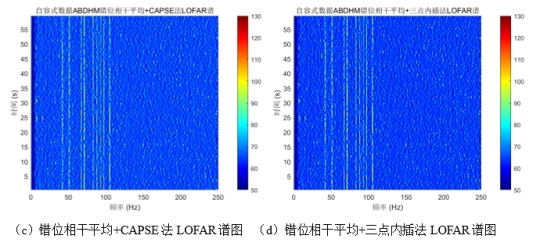
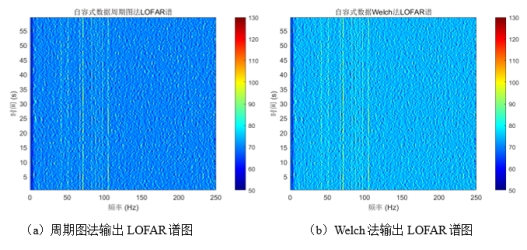
图3 海试数据各方法LOFAR 谱图
3.多基阵被动水声定位方法研究
采用波浪滑翔机搭载被动声学阵列进行多基阵被动水声定位方法研究。方位交叉定位对信号形式、信号相关性、海洋水温参数等无特别要求,依赖北斗卫星的精确授时技术,具有工程可实现性。主要思想如下:首先判断两个目标是否属于同一波浪滑翔机被动声学阵列,同一阵列发现的目标不做交叉计算;其次,根据北斗定位计算两台波浪滑翔机声学阵列之间的距离 L 和与正北方的夹角,同时确定波浪滑翔机之间的相对位置,进而确定基准位置;然后,进行坐标变换以修正声学阵列与正北方向产生的模型坐标系方位差;根据声学基阵的实际情况对计算所得的交叉点进行过滤以降低计算复杂度,如根据声学阵列的相对距离和角度去除实际不可能存在的交叉点;根据公式(1)、公式(2)计算交叉点与声学阵列A和B的相对距离。


其中, ,
,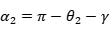 ,
, 和
和 分别为A和B两台波浪滑翔机被动声学阵列测得的声源方位(相对于声学被动阵列阵首),
分别为A和B两台波浪滑翔机被动声学阵列测得的声源方位(相对于声学被动阵列阵首), 和
和 分别为A和B被动声学阵列与其阵中心连线的夹角(相对于声学被动阵列阵尾),具体几何空间结构图如下图所示:
分别为A和B被动声学阵列与其阵中心连线的夹角(相对于声学被动阵列阵尾),具体几何空间结构图如下图所示:
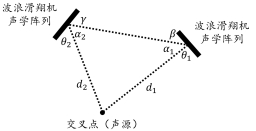
图4 波浪滑翔机海洋环境噪声观测系统组成示意图
4.盲源分离的挑战、进展与未来方向
盲源分离(Blind Source Separation,BSS)技术在水声信号处理中扮演着关键角色,尤其在被动声纳系统、目标检测、噪声抑制和水下目标识别等应用中至关重要。独立成分分析(ICA)、非负矩阵分解(NMF)等传统盲源分离方法在处理水声信号时面临多途传播、低信噪比和时变非平稳性等挑战,且难以有效分离基于卷积模型的混合信号。近年来的研究开始探索新的方法来应对这一挑战:
(1)低信噪比条件下的水声信号盲源分离:研究如何在高背景噪声的环境中有效分离出目标信号;
(2)多途信道下的水声信号分离:考虑水声信号在多途效应下的传输特性进行信号分离;
(3)欠定条件下的盲源分离:在传感器数量少于源信号数量时,探索如何利用有限的传感器资源分离出更多的源信号;
(4)深度学习技术的结合:研究如何利用深度学习技术,通过大规模数据训练,捕捉复杂的非线性关系,以解决传统方法难以应对的多途效应和非平稳性问题。
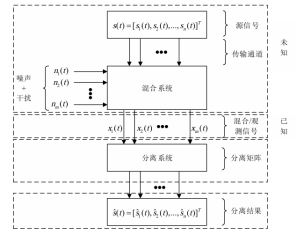
图5 盲源分离基本框架
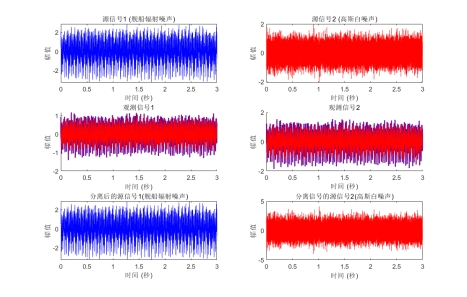
图6 线性混合条件下的模拟舰船辐射噪声盲源分离
5.海洋背景环境噪声反演海面风速与降水强度
波浪滑翔机利用海洋背景环境噪声来估计海表风速和降雨量,已成为海洋环境监测和气象研究的重要技术手段。海洋背景噪声主要来自海面风力、海浪、降雨以及海洋生物等多种因素。波浪滑翔机配备声学传感器(如水听器阵列)来收集这些背景噪声信号。海表风速和降雨量的变化会影响海洋噪声的特征,从而改变噪声的频谱和能量分布。通过实时采集大量噪声数据,并结合深度学习和机器学习等先进技术,系统能够分析噪声特征,进而准确估计风速和降雨量。
这一技术具有多个显著优点:首先,它无需接触海洋表面,实现非接触式监测;其次,能够全天候、实时地进行监测,适应极端天气条件;第三,系统成本较低且覆盖范围广,尤其适合在远程海域和难以接触的海域进行监测。此外,通过多维数据融合,可以提高估计精度,提供更为准确的海洋气象信息。

图7 波浪滑翔机海试图
6.海洋哺乳动物声学调查
面向海洋哺乳动物调查的实际需求,中国海洋大学波浪滑翔机团队于2021年初开启声学智能辨识关键技术研究,研制波浪滑翔机专用海洋哺乳动物声学辨识载荷,并陆续在我国南海以及西太平洋海域开展了数十次海上常态化调查试验。当前,该载荷以树莓派作为硬件基础,嵌入深度学习算法,采用波浪滑翔机自容式声学数据作为训练样本,可实时感知海洋哺乳动物叫声、辨识其种类,并可将声纹特征通过卫星实时传输至监控实验室。海洋哺乳动物的声学信号频谱图具有明显的谐波结构,主要出现在中高频,且具有明显的“V”型信号结构。在海洋哺乳动物靠近波浪滑翔机时,根据Welch功率谱估计,在5kHz~9kH之间出现了明显的能量激增。如下图所示:
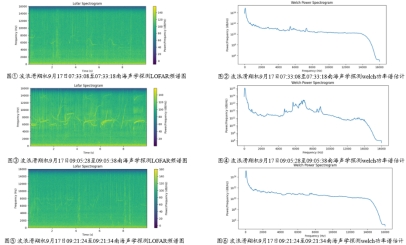
图8 波浪滑翔机不同时段的南海声学探测频谱特征
7.基于深度学习的水声目标识别技术
7.1高价值目标数据建模
水声异常感知以声学目标数据集进行建模,对海洋目标声学大数据进行分析,主要面向被探测目标声学数据量充足,固定海域目标类别已知的场景。可利用深度卷积神经网络模型和注意力机制进行特征提取,采用全连接层或支持向量机做分类器,来区分海洋环境信息和目标信息。结合AudioSet等非水声传统互联网数据和高价值目标数据集进行大规模预训练,然后采用迁移学习方法在水声目标数据集上进行微调训练,来增强模型的鲁棒性和泛化能力。采用监督学习或半监督学习方式,充分挖掘有标签数据和无标签数据的频谱信息。最后,通过交叉验证进行性能评估,通过超参数调优和架构调整不断进行优化,以提升水声异常感知性能。
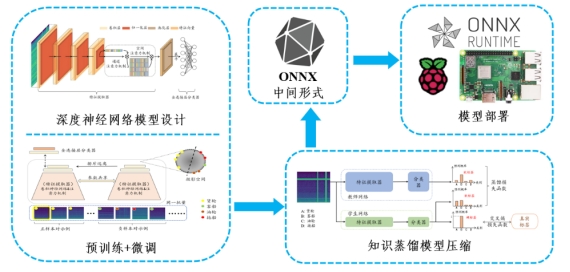
图9 水声目标识别整体框架
7.2海洋环境噪声建模
水声异常感知对海洋环境噪声进行建模,对不同海况、不同气象条件下的海洋环境背景噪声进行数据分析,主要针对敏感目标声学数据缺失、目标类别未知的应用场景,克服传统水声目标识别任务在对训练集中未出现目标类别进行推理判断时模型性能急剧下滑的情况。设计基于深度自编码器Transformer架构的深度学习算法,利用无监督学习方法进行模型训练,用于水声异常感知。通常由编码器和解码器组成。编码器用于特征提取。解码器采用双路结构,分别为重构分支和预测分支,重构分支进行低维声学表征重建,预测分支根据前几帧的声信号预测当前帧的声学信息。当重建信息与预测信息相似度高,则计算所得的信任度高,称当前为常规声学事件;因模型训练集中只包含海洋环境噪声(常规声学事件),当测试集中出现声学异常事件时,模型可能无法正常重建或预测,导致重建信息和预测信息差别较大,若低于所设置的阈值,则认为出现声学异常事件,疑似目标出现。
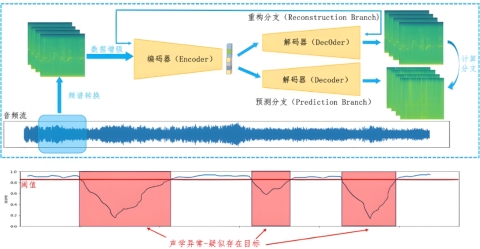
图10 声学异常检测模型框架图
7.3多模态表征学习
多模态学习是一种机器学习方法,旨在处理和分析不同的模态(数据类型或信号源,如图像、语音、文本和传感器数据等)的信息,克服声学单一模态的不足,提升目标识别能力。在声学探测的基础上,对波浪滑翔机进行多源信息融合,利用传感器互补性增强系统适应性,优化目标识别,最大化数据优势,提高检测精度和理解能力。
图11 多模态表征学习主要研究内容

图12 多模态表征学习主要技术框架