目前用于海洋监测和预警的手段包括卫星遥感、海洋观测船舶、海洋浮标、岸基海洋观测站、海底观测系统和预警系统,可以实现对海啸、飓风、洪水和海浪的有效预警,并广泛应用于对水质、海洋污染、珊瑚礁健康、鱼群数量和分布等方面的监测。但上述常规平台存在覆盖范围有限、依赖外部能源、高成本和维护困难等缺点,因此科学家们逐渐转向具有长时间在海洋中自主运行、成本低、能耗小且范围广等优点的海洋自然能无人驱动领域。
相对于常规海洋监测平台,波浪滑翔机作为一种自然能驱动的海洋无人航行器,其可以进行长时间自主运行,观测目标海域的海洋环境变化,而无需人员持续驻留,并具有根据需求进行编程和配置的能力,以适应不同的任务和环境。
为确保其在海洋环境中的定位精度、任务执行能力和能量效率,波浪滑翔机的自主导航技术主要涉及以下关键领域:
1. 波浪滑翔机动力学建模与控制器设计
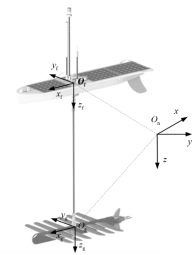
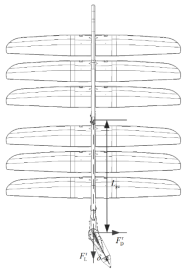
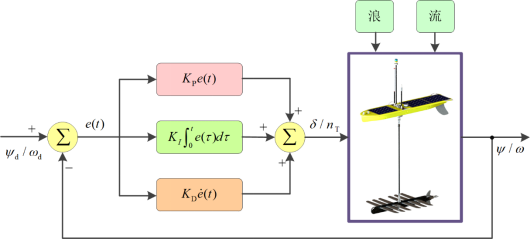
通过分析波浪滑翔机运动特性和海洋环境要素,构建海流和波浪的海洋环境模型。建立波浪滑翔机动力学模型,将浮体船的运动分解低频水平运动和波浪频率起伏运动,将脐带缆视为高强度弹簧,水下牵引机动力学模型与浮体船相似,分别建立动力学模型。采用计算流体动力学仿真确定水翼力,通过水池实验确定不同螺旋桨转速下的推力。结合单个方向舵和单个螺旋桨,分析波浪滑翔机桨舵融合控制特性,设计基于数字PID的并联双输入/双输出桨舵控制器。
|
|
图1 波浪滑翔机坐标系 | 图2 方向舵诱导力分析 |
| |
图3 PID控制器结构 | |
2.多目标全局路径规划方法
全局路径规划是实现波浪滑翔机自主导航的关键技术之一,其目的是在给定起点、终点和现有已知障碍物的情况下,寻找一条最优路径使得波浪滑翔机能够安全、高效地完成导航任务。
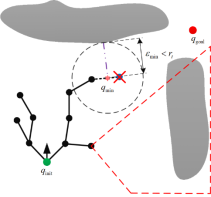
针对波浪滑翔机全局路径的节能、短距离和安全等多目标权衡问题,设计多目标全局路径规划方法,以确保波浪滑翔机在不确定海洋环境中高效航行,如KS-RRT*算法。综合考虑波浪滑翔机运动学和安全域约束,建立路径安全方案,提高规划路径的安全性。此外,评估每个可行轨迹的能量成本、路径长度和安全度量,可采用TOPSIS算法解决多目标路径优化问题,通过B样条算法平滑最优路径,确定最终路径。
| |
图4 KS-RRT*算法随机抽样和节点扩展过程 | |
|
|
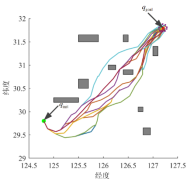
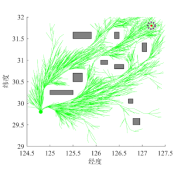
图5 多障碍环境中算法规划结果 | 图6 多障碍环境下算法的扩展树 |
3.TCD-EAPF局部路径规划方法
波浪滑翔机的全局路径规划旨在寻找满足距离、安全和能耗要求的最优路径,然而其在复杂海洋环境中航行时还面临着诸多挑战,如运动状态实时变化的动态障碍物和未知静态障碍物。这些因素增加了波浪滑翔机路径跟踪的复杂性,同时也影响了任务执行效率。因此除了预先确定全局路径之外,还需要根据动态海洋环境实时规划局部路径。
通过优化传统APF算法,解决了局部最小和目标不可达问题。在动态避障过程中,考虑复杂海洋环境的影响,提出EAPF算法,通过增加环境引力场,提高了波浪滑翔机在避障过程中的机动性,同时减少了环境对航行轨迹的影响。在预测动态障碍物方面,采用了不同的动态障碍物模型,并引入了TCD算法来预测波浪滑翔机与动态障碍物之间的碰撞风险,以适应波浪滑翔机的弱机动性。
|
|
图7 逃逸力组成 | 图8 时间戳碰撞检测模型 |
| |
图9 TCD-EAPF局部路径规划方法 | |



4.基于PLOS制导律的路径跟踪方法
复杂海洋环境下波浪滑翔机的路径跟踪控制问题一直是制约其性能发挥的关键难题。路径跟踪控制是确保海洋无人航行器在复杂不确定的海洋环境中可靠、稳健航行的基础功能之一,对于提高导航精度和实现平稳运动控制至关重要。在波浪滑翔机的路径跟踪控制方面,过去研究主要关注单个方向舵波浪滑翔机和单个螺旋桨波浪滑翔机。
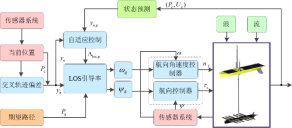
项目团队提出一种基于PLOS制导律的新型路径跟踪方法,研究桨舵系统协同控制策略,提高波浪滑翔机路径跟踪性能。所提出的PLOS制导律在传统LOS制导律的基础上引入状态预测器,通过结合交叉轨迹误差的预测值和当前值来确定下一时刻前视距离,提高路径跟踪控制方法对环境的适应性。结合波浪滑翔机的动力学模型,PLOS制导律输出的期望航向角作为航向控制器的输入,以控制方向舵角,同时输出的期望航向角速度作为航向角速度控制器的输入,以控制螺旋桨转速,实现高效路径跟踪控制。
|
|
图10 路径跟踪控制流程 | 图11 基于PLOS制导律的路径跟踪方法 |
| |
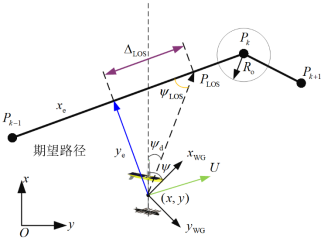
图12 LOS制导律原理 | |

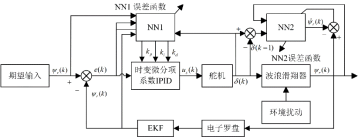
5.基于BP神经网络的波浪滑翔机自适应航向控制研究
航向控制是波浪滑翔机自主导航控制的最基础环节。考虑其航行过程中面临非线性、弱机动性及复杂海洋环境等挑战,提出一种双神经网络的自整定IPID航向控制方法,通过改进的人工水母搜索算法优化控制参数,并改进时变微分项系数,可有效避免环境干扰下的超调和执行器饱和。
|
图13 波浪滑翔机闭环航向控制框图 |
6.试验平台构建与海试验证
波浪滑翔机导航系统实验包括波浪滑翔机转弯机动性海试、航向跟踪海试、路径跟踪海试、局部路径规划海试和全局路径规划实验。同时,为了验证所建立的动力学模型与所提出的控制方法的有效性,将海试期间的海洋环境数据导入MATLAB仿真软件,进行仿真分析。通过构建波浪滑翔机试验平台以及在实际和模拟海洋环境中分别进行试验,对所建立的动力学模型与所提出的控制方法进行全面评估和验证,为波浪滑翔机进一步研究和应用提供指导。
|
|
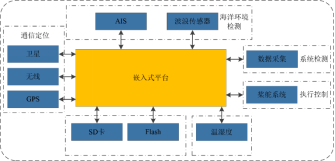
图13 波浪滑翔机试验样机 | 图14 波浪滑翔机控制系统 |
| |
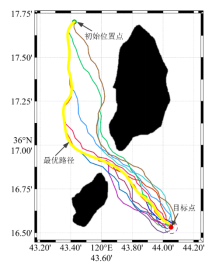
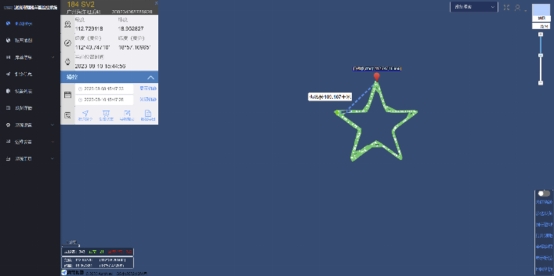
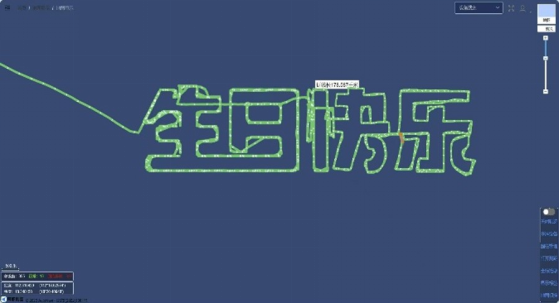
图15 实际海洋环境下路径规划结果
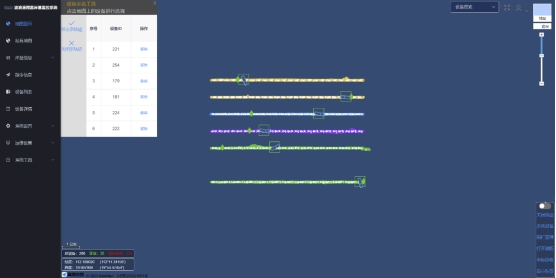
图16 波浪滑翔机自主导航轨迹展示 | |
| |



7.波浪滑翔机自主导航学术成果
已发表论文:
[1] Ying Zhou, Xiujun Sun*, Hongqiang Sang*, Peiyuan Yu. Robust dynamic heading tracking control for wave gliders[J], Ocean Engineering, 2022, 256: 111510.
[2] Peiyuan Yu, Ying Zhou*, Xiujun Sun*, Hongqiang Sang, Shuai Zhang. Adaptive path following control for wave gliders in ocean currents and waves[J], Ocean Engineering, 2023, 277: 114326.
[3] Shuai Zhang, Xiujun Sun*, Hongqiang Sang*, Ying Zhou, Peiyuan Yu. Research on path following control system of wave gliders based on maneuverability demand estimator. Ocean Engineering, 2023, 287: 115932.
[4] Peiyuan Yu, Xiujun Sun*, Ying Zhou*, Hongqiang Sang, Shuai Zhang. Adaptive station-keeping strategy for wave gliders considering uncertain environmental disturbances [J], Ocean Engineering, 2023, 284: 115251.
[5] Shuai Zhang, Xiujun Sun, Hongqiang Sang*, Ying Zhou, Peiyuan Yu. A multi-objective path planning method for the wave glider in the complex marine environment[J]. Ocean Engineering, 2022, 264: 112481.
[6] Peiyuan Yu, Ying Zhou*, Xiujun Sun, Hongqiang Sang, Shuai Zhang. Station-keeping strategy for wave gliders considering obstacle area. Control Engineering Practice, 2024, 153: 106093.
[7] Shuai Zhang, Xiujun Sun, Hongqiang Sang*, Ying Zhou, Peiyuan Yu. Research on the maneuverability and path following control of the wave glider with a propeller-rudder system[J]. Ocean Engineering, 2023, 278: 114346.
[8] Xiujun Sun, Zhongzhe Chen, Ying Zhou*, Peiyuan Yu, Hongqiang Sang. Neural network based self-tuning IPID for wave glider heading tracking control. Ocean Engineering, 2024, 307: 118152.
[9] Peiyuan Yu, Ying Zhou*, Xiujun Sun, Hongqiang Sang, Shuai Zhang. Station-keeping strategy in emergency mode for wave gliders considering power shortages. Applied Ocean Research, 2024, 153: 104236.
[10] Shuai Zhang, Xiujun Sun*, Hongqiang Sang*, Ying Zhou, Peiyuan Yu. A real-time local path planning algorithm for the wave glider based on time-stamped collision detection and improved artificial potential field[J]. Ocean Engineering, 2023, 283: 115139.
[11] Xiujun Sun, Ying Zhou, Hongqiang Sang*, Peiyuan Yu, Shuai Zhang. Path following control of wave gliders in time-varying environment. Ocean Engineering, 2020, 218: 108165.
[12] Shuai Zhang, Xiujun Sun*, Hongqiang Sang*, Ying Zhou, Peiyuan Yu Maneuverability prediction of the wave glider considering ocean currents[J]. Ocean Engineering, 2023, 269: 113548.
[13] Hongqiang Sang, Ying Zhou, Xiujun Sun*, Shaoqiong Yang. Heading tracking control with an adaptive hybrid control for under actuated underwater glider[J], ISA Transactions, 2018, 10: 554-563.
已授权专利:
[1] 一种波浪滑翔器的锚定方法及系统, 中国发明专利.
[2] 一种基于太阳能电池板的波浪滑翔器定位方法及系统, 中国发明专利.
[3] 一种波浪滑翔器全局路径规划方法及系统, 中国发明专利.
[4] 一种分布式布局的波浪滑翔器控制系统, 中国发明专利.
[5] 一种分布式架构的波浪滑翔器控制系统, 中国发明专利.
[6] 一种基于波浪滑翔器的水声检测识别避障方法及系统, 中国发明专利.