一、引言
波浪滑翔机是一种利用波浪能驱动的海上无人移动观测平台,能够大范围、全方位和实时性地对海洋环境进行长期探索,在海洋应用研究中有着十分广阔的前景。波浪滑翔机的动力主要来源于牵引机产生的推进力,其弹簧水翼机构(HSM)将波浪能转化为前向动能,是重要的能量转换装置,对波浪滑翔机的综合性能具有重要的影响。因此,本研究针对波浪滑翔机弹簧水翼机构的动力性能进行分析与研究,工作内容如下:
首先,通过对弹簧水翼机构数值计算理论方法的分析,确定本文数值模拟计算中的设置方法与参数,并在此基础上对弹簧水翼机构的运动形式、受力状况和动力性能参数进行分析。
其次,确定仿真外部输入条件,对影响弹簧水翼机构的两个重要结构参数——弹簧刚度系数(SSC)和限位角(LPA)进行仿真分析。重点探究在既定海况下不同弹簧刚度系数与限位角对弹簧水翼机构动力性能的影响,通过仿真结果对这两种结构参数进行动力性能分析,结合涡流理论阐述限位角提高水翼动力性能的原因,并通过不同波高下的性能参数进行验证分析。
二、弹簧水翼机构动力性能研究
主要利用计算流体力学软件CFD FLUENT,将弹簧水翼机构的运动学模型通过用户自定义函数UDF编译与加载实现水翼被动运动,对弹簧水翼机构的仿真模型进行了建立,主要探究了弹簧刚度系数与限位角对其动力性能的影响,分析了涡流对水翼前向推进性能的影响,阐述了限位角提高水翼动力性能的根本原因,最后通过不同波高下的仿真验证结论的准确性。
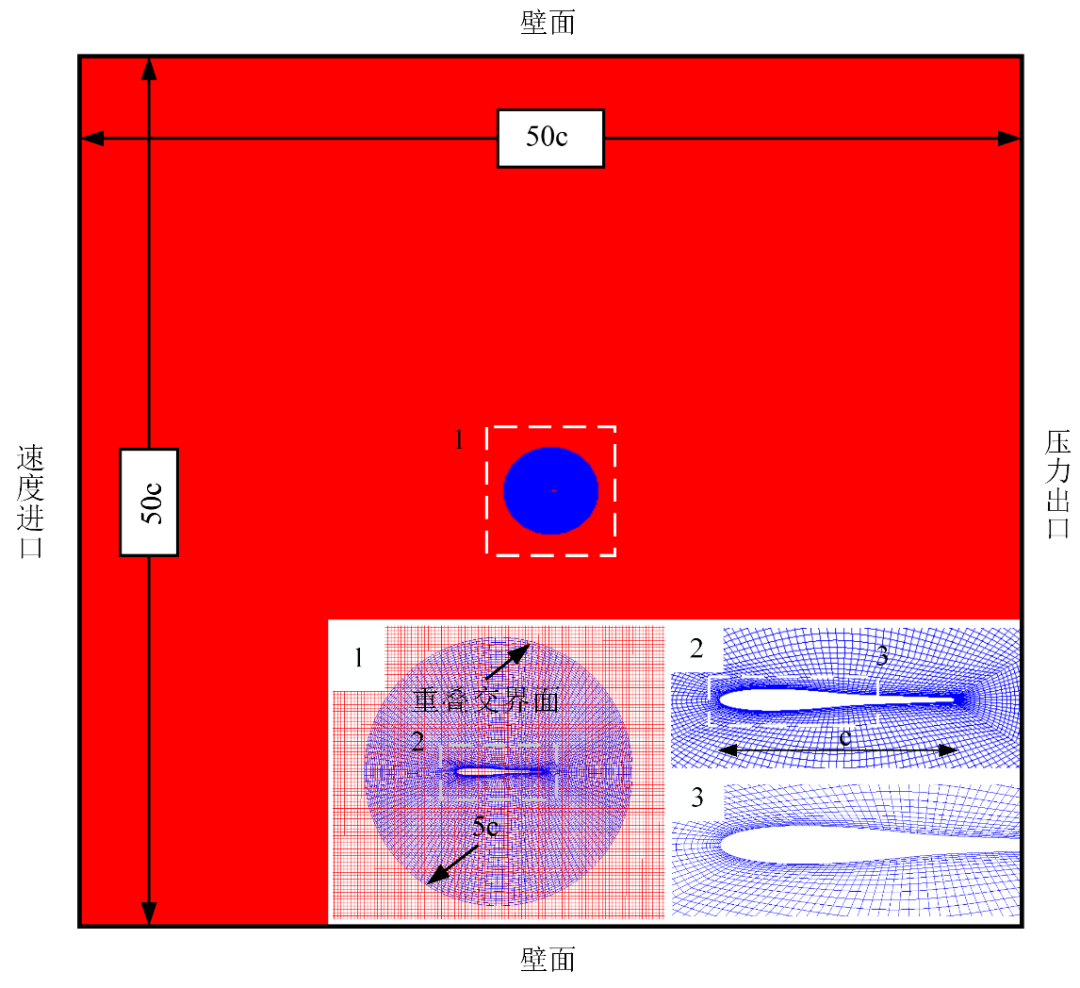
图1 仿真模型
将弹簧水翼机构的运动学方程通过UDF加载并编译到fluent中进行数值仿真计算,由于水翼在上升和下降阶段都存在加速和减速阶段,这导致在一个运动周期内水平方向的力有两次变化,而垂直方向的力只有一次变化,因此,水翼始终可以为波浪滑翔机提供前向推进力。当弹簧刚度系数大于3000 N/m时,力矩系数在与时刻变化剧烈。有效攻角可以通过俯仰角和入射速度进行计算,而推进力的水平分解则由升力和攻角决定。当弹簧刚度系数较小时,前向推力系数随着水翼升力系数的减小而减小,而弹簧刚度系数较大时,推进系数随着水翼升力系数的增大而增大。由于软弹簧的力矩较小所以在短时间内快速达到最大角度,俯仰角曲线变化剧烈,而硬弹簧的力矩较大,所以在运动过程中俯仰角曲线变化缓慢。
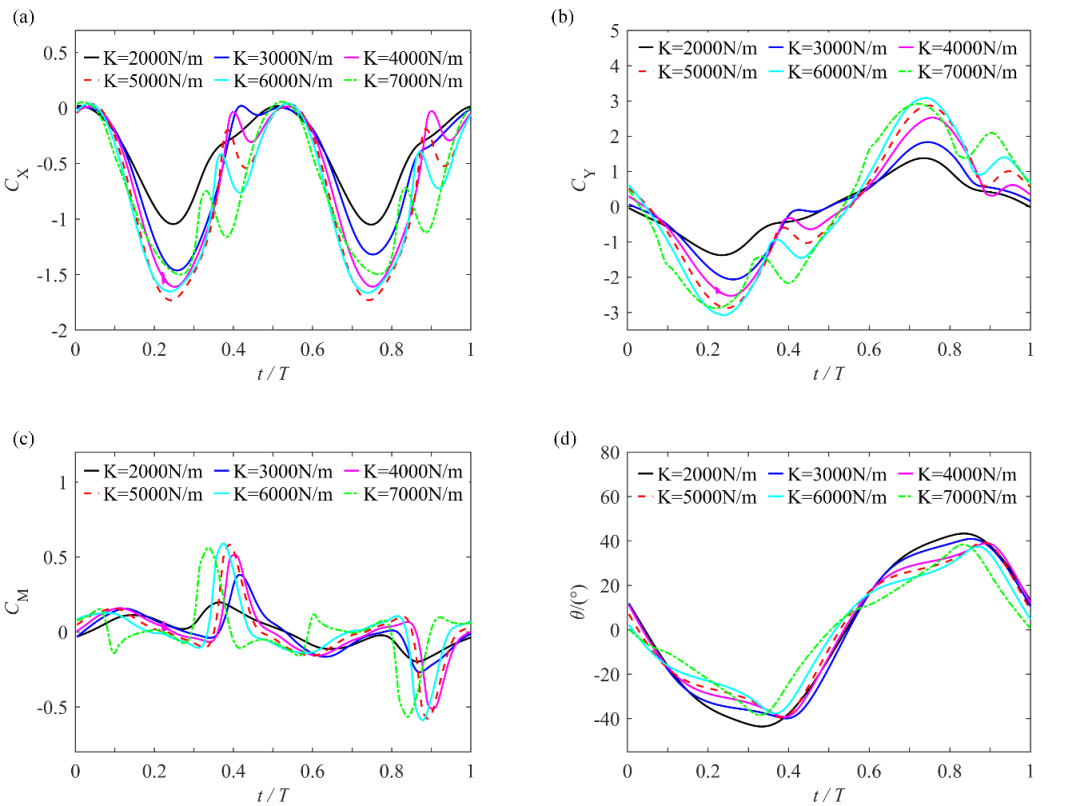
(b)升力系数;(c)力矩系数;(d)俯仰角
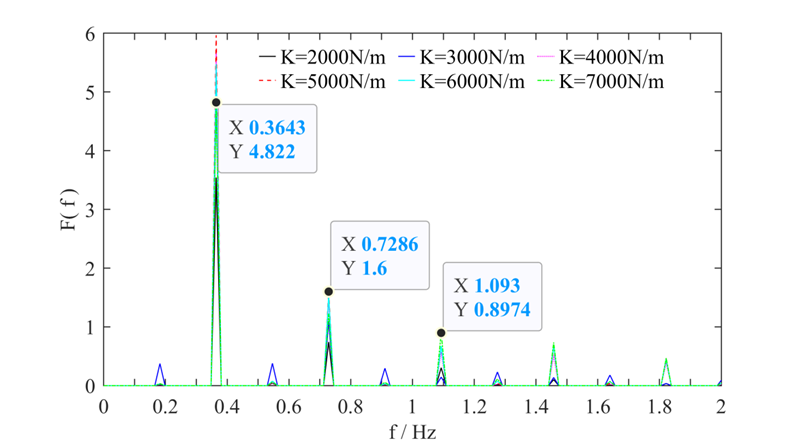
弹簧刚度系数对弹簧水翼机构动力性能的影响进行了时域上的分析,为了更深入探究弹簧水翼机构输入与输出的关系,选取前向推力系数对其进行傅里叶变换进行频域上分析,如图所示。从频域曲线图中可以看出,主频集中在0.3643 Hz,并且其他频率是主频率的倍数。而波浪的输入周期为5.5 s,其波浪频率为0.182 Hz,由此可以看出,前向推力系数的主频为波浪频率的两倍,这表明弹簧水翼机构的前向推力与输入条件波高和周期密切相关,并且与输入波浪频率成倍数关系。这也间接的解释了为什么波浪的频率越大水翼产生的前向推进力也越大。
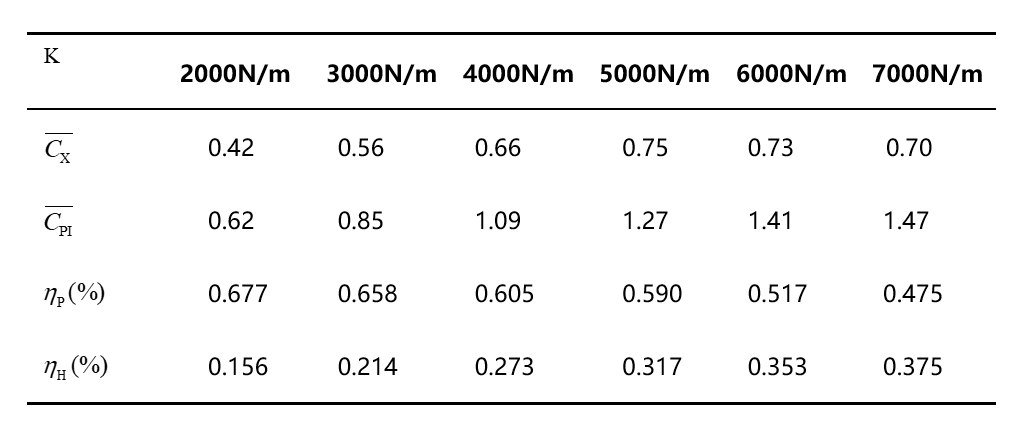
不同弹簧刚度系数下弹簧水翼机构的平均推力系数、平均输入功率、推进效率和波浪能获取效率如表1所示。
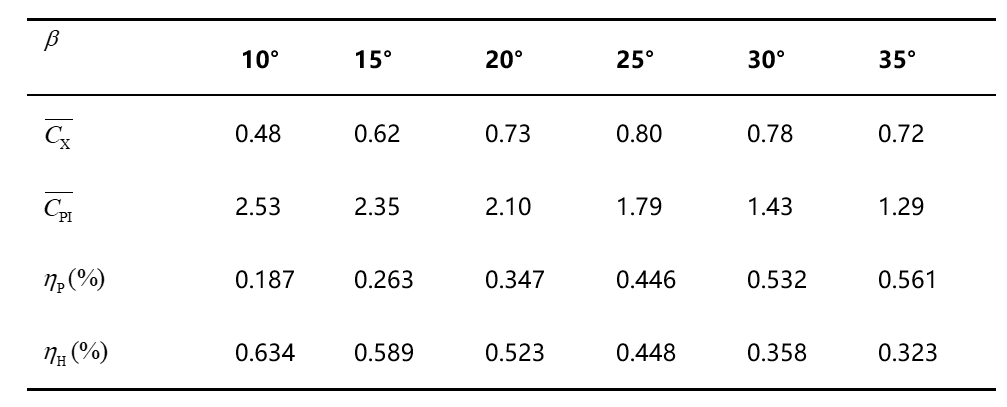
不同限位角下的平均前向推力系数、平均输入功率、推进效率和波浪能获取效率如表2所示。通过表2可以发现,随着限位角的逐渐增大,平均前向推力系数先增大后减小,当限位角为25°时,水翼的平均前向推力系数达到最大值。通过与表3.2没有加载限位角的水翼机构对比发现,其平均前向推力系数与平均输入功率均有所提高。这说明限位角可以提高波浪能对弹簧水翼机构前向推力的转换效率,并且推进效率随着限位角的增加而逐渐提高,然而,随着限位角的逐渐增大,水翼对波浪能提取的效率却在不断下降,这是由于限位角对水翼角度进行了限定,使得水翼克服水阻力进行滑翔。
三、海试
海试实验的对象为两台“黑珍珠”号波浪滑翔机,一台为无限位角波浪滑翔机,一台为限位角25°波浪滑翔机,弹簧刚度系数选用5000 N/m,水翼选择三维仿生水翼,如图4所示。实验海域选择青岛千里岩海域,整个海试实验主要分为四个阶段分别是拷机测试阶段,设备布放阶段,实时监测阶段和设备回收阶段。拷机测试主要测试 “黑珍珠”号波浪滑翔机远程通讯与电路系统的稳定性,主要包括远程传输信息系统是否能正常回传数据和远程命令是否及时控制、电源控制系统是否能正常为蓄电池供电和太阳能电池板是否工作正常等。
设备布放阶段是将完成拷机测试阶段的“黑珍珠”号波浪滑翔机通过船舶运输到青岛千里岩附近海域,利用布放小车、布放绳和布放钩对其进行布放,在布放前在将两台波浪滑翔机上安装AIS网位移,方便在回收阶段能够对其进行定位。实时监测阶段是对布放完成的“黑珍珠”号波浪滑翔机远程进行控制,主要通过改变目标点与运行方式,为了更好的比较无限位波浪滑翔机与限位角25°波浪滑翔机的速度,此次海试实验设置为两个目标点之间的直线折返航行。在实验中,波浪滑翔机按照10分钟的间隔,通过铱星传输波浪滑翔机的相关信息,如GPS位置、海况参数、航向信息,水下牵引机通过罗盘获取的自身运动过程中的姿态数据等。设备回收阶段根据AIS信号和GPS信号位置信息对波浪滑翔机的位置区域进行确定,船开至目标范围区域,利用船上的吊装装置进行回收。

图4“黑珍珠”号波浪滑翔机海上航行图
无限位角与限位角25°波浪滑翔机的实际速度、拟合速度和平均速度曲线得出无限位角波浪滑翔机的平均速度是0.307m/s,而限位角25°波浪滑翔机的平均速度是0.3718m/s,二者的平均速度差为0.065m/s,同时对比无限位角波浪滑翔机,限位角25°波浪滑翔机的速度提高了30%,这表明限位角25°的结构配置提高了波浪滑翔机的速度性能。
四、结论
首先进行了弹簧水翼机构数值计算理论与模型分析。在弹簧水翼机构计算模型分析中,重点对弹簧水翼机构的运动状况、受力状况及动力性能参数展开分析;在仿真策略分析中,建立了弹簧水翼机构的仿真模拟构架,理清了仿真分析的过程中主要理论点,并确立了弹簧水翼机构仿真方案。
其次针对弹簧水翼机构的弹簧刚度系数参数对动力性能的影响展开研究,在设定青岛近岸海况的二级海况输入条件下,对其进行模拟仿真,结果显示,当弹簧刚度系数为5000 N/m时,水翼获取的前向推进性能最大。在此研究的基础上,为了增大水翼的输入功率,继续探究了限位角对其动力性能的影响,结果表明,当限位角为25°时,水翼获取的前向推进性能最大,并且与无限位角相比,平均前向推力增加了10%,输入功率增加了42.7%。同时,水翼限位角的存在避免了前向推力系数曲线与升力曲线的双峰现象,为水翼的运动提供了稳定和持续的前向推进力,通过仿真验证了结论的准确性。
最后为了验证限位角25°对波浪滑翔机整体性能的提升,对无限位角与限位角25°波浪滑翔机进行了海试实验,给出了海试过程中航迹与速度数据,对海试过程中两台波浪滑翔机的直线航行阶段海试数据进行了分析。结果表明,通过对航迹与速度数据进行对比,航迹偏差与速度服从正态分布,限位角25°的航向保持能力也要优于无限位角,并且与无限位角波浪滑翔机对比,限位角25°波浪滑翔机的速度提高了近30%。