一、引言
波浪滑翔机是一种利用波浪能驱动和太阳能供电的新型海洋移动观测平台,具有长续航、广范围、低成本等优势,广泛应用于海洋观测、海洋资源勘探和国防安全等领域。现阶段由于海洋环境的不确定性、能源限制和缺乏有效的控制方法等问题,仍不具备完全自主性。青岛海舟科技有限公司自主研发的桨舵融合波浪滑翔机,改进了现有波浪滑翔机不足,结合方向舵和矢量螺旋桨,能够进一步提高波浪滑翔机的机动性。机动性是评判桨舵融合波浪滑翔机综合性能的重要条件。良好的机动性对其自主导航、定点锚泊、路障规避等任务的有效实现具有重要意义。
二、研究分析概述
从变速和转弯两方面进行桨舵融合波浪滑翔机机动性分析。在四种海洋环境中对前向速度性能进行仿真,舵角设置为0°,四种不同螺旋桨转速下桨舵融合波浪滑翔机的前向速度曲线如图1所示。
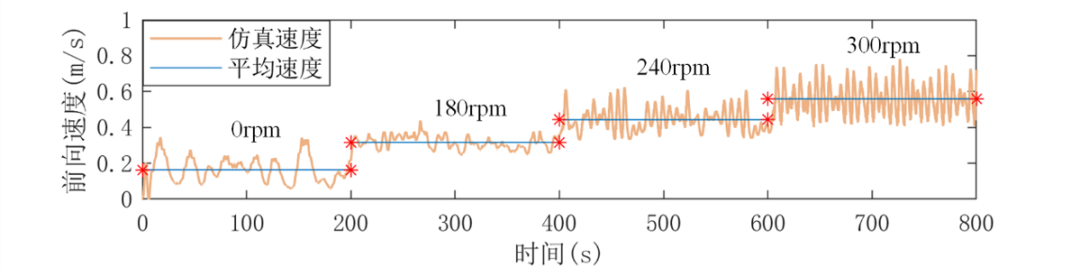
(a) #a
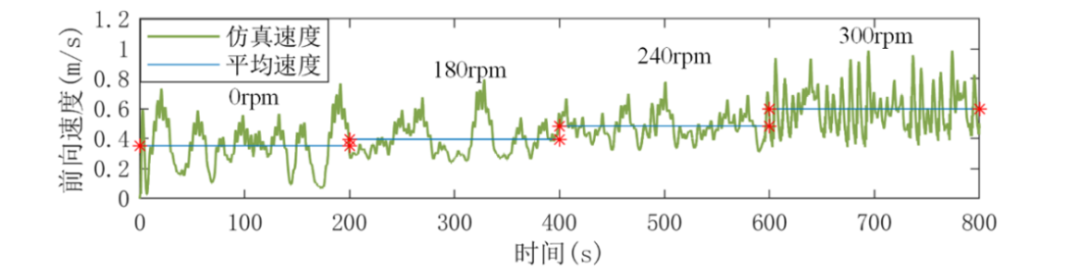
(b) #b
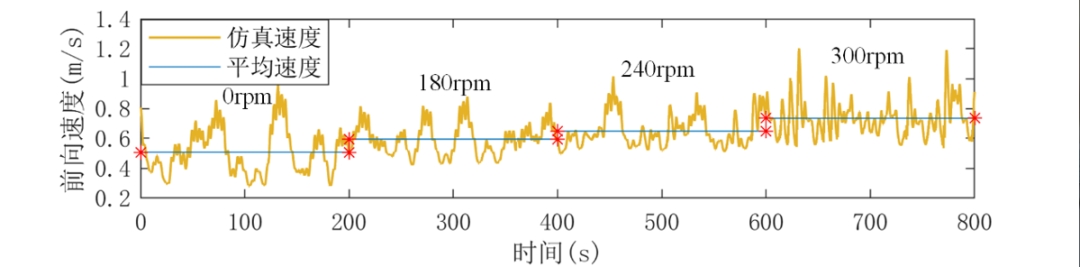
(c) #c
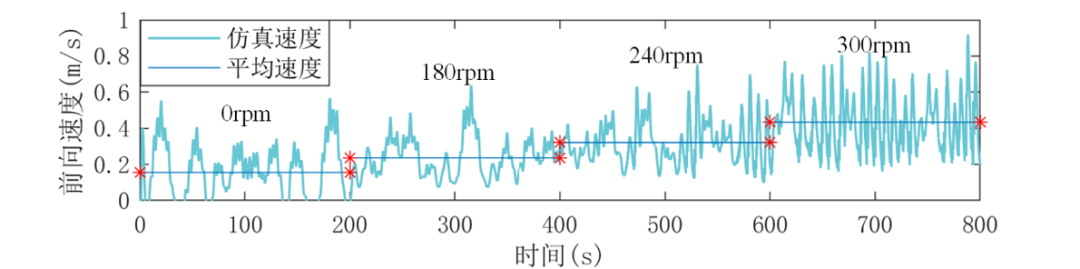
(d) #d
图1 不同环境条件下桨舵融合波浪滑翔机前向速度性能曲线
在#a、#b海洋环境条件,进行回转运动模拟仿真,对比了波浪滑翔机在给定舵角分别为10°、20°、30°时,不开启螺旋桨和螺旋桨转速为240rpm时的转弯性能。图2和图3所示为波浪滑翔机回转轨迹仿真结果。
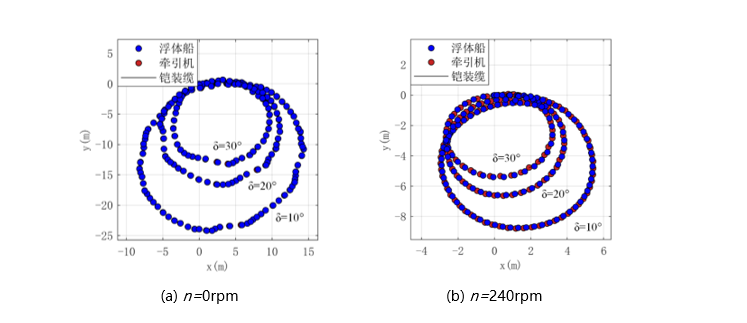
图2 #a环境条件下不同舵角时波浪滑翔机的回转轨迹
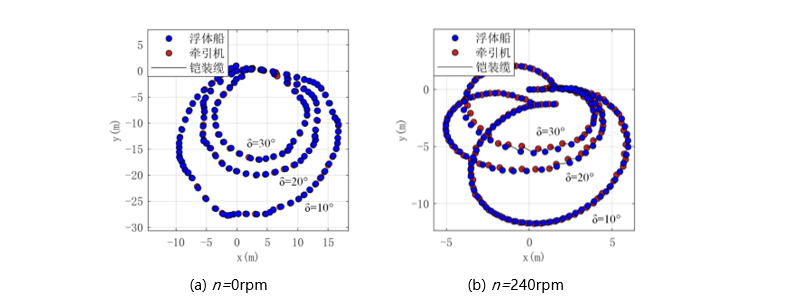
图3 #b环境条件下不同舵角时波浪滑翔机的回转轨迹
仿真结果可以看出,在四种不同的海况下,随着螺旋桨转速在一定范围内增加,波浪滑翔机的平均前向速度显著增加。螺旋桨可以为波浪滑翔机提供一定的前进推力,从而降低了波浪滑翔机对波浪等级的依赖性,使其在低级海况和近岸情况下也可以以一定速度工作,有一定的抗流能力;相比于较三级海况,在二级海况下,开启螺旋桨对桨舵融合波浪滑翔机前进速度的提升性能更好。转弯性能仿真结果可以看出在低海况下进行回转运动时,开启螺旋桨后波浪滑翔机的转弯性能得到显著提高,转弯半径显著减小。
三、海试实验
为了验证桨舵融合波浪滑翔机机动性分析的可靠性,在青岛近海开展了海试试验。试验中使用的波浪滑翔机配备了GPS、波浪传感器和指南针等传感器以收集数据。图4所示为螺旋桨性能测试轨迹,以测试螺旋桨在180rpm时且方向舵角度为0°时的前进速度,以及转速在240rpm、方向舵角度为10°时的转弯性能。
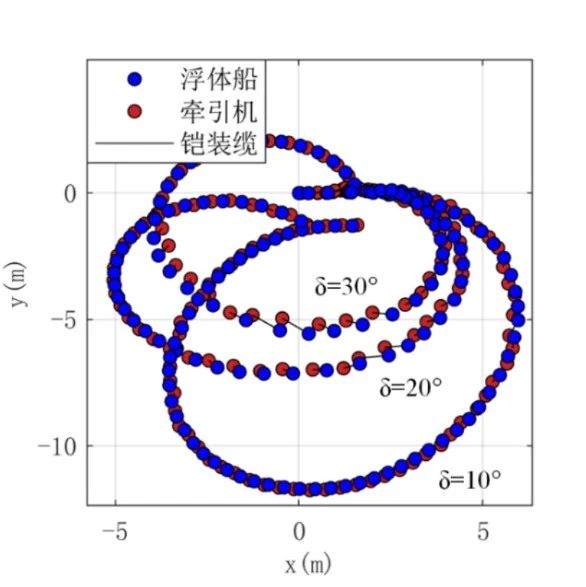
图4 海试期间螺旋桨测试轨迹
图5展示了固定舵角为10°、20°和30°时桨舵融合波浪滑翔机的轨迹。
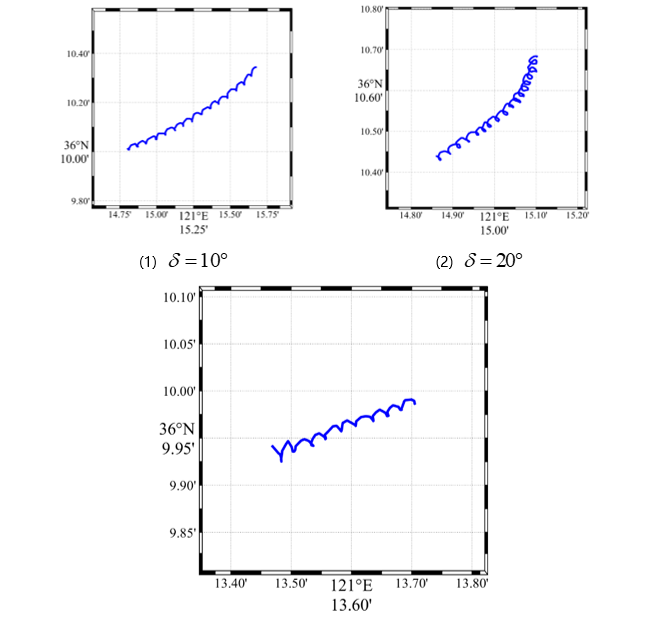
图5海试中转向机动性试验轨迹
图6显示了在舵角分别为10°、20°和30°的情况下,桨舵融合波浪滑翔机进行回转试验的仿真结果与海上实测结果的对比。
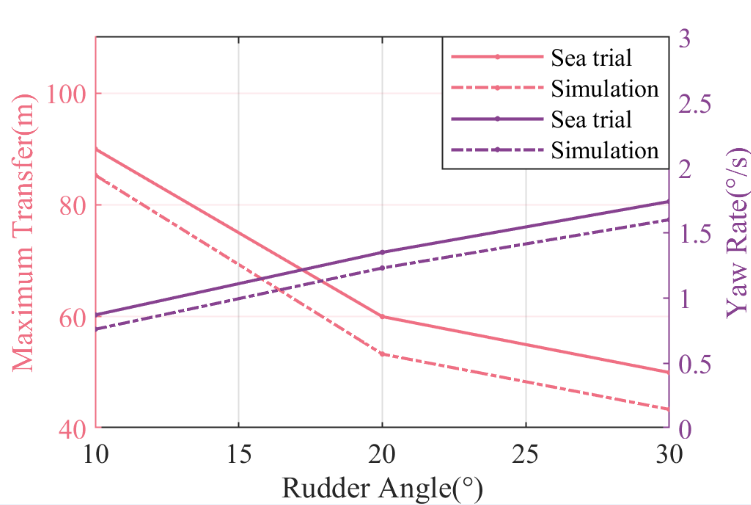
图6 WG转向性能试验仿真与海试结果比较图
在启动螺旋桨之前,桨舵融合波浪滑翔机的平均速度约为0.408m/s。启动螺旋桨后,平均速度可达约0.597m/s,桨舵系统可以在一定程度上提高波浪滑翔机的前进速度。当启动螺旋桨时,波浪滑翔机的转弯半径显著减小,转弯机动性明显提升。随着舵角的增加,转弯半径显著减小,与模拟趋势一致。此外通过比较海上试验和模拟数据,可以观察到误差范围在5%到10%之间,表明模拟和实验结果之间存在较好的一致性,机动性分析结果具有可靠性。
四、结论与展望
本研究对新一代“黑珍珠”桨舵融合波浪滑翔机的机动性进行分析,从变速和回转两方面对桨舵融合波浪滑翔机的机动性进行数值模拟并分析。分析表明桨舵融合波浪滑翔机具有较好的前向速度性能和较好转弯机动性。在不同海况下,螺旋桨转速为300rpm时,波浪滑翔机平均前进速度最大可增加3.5倍。与螺旋桨未启动时相比,转速为240rpm时波浪滑翔机的平均转弯直径减小了2.52倍。通过对比海上试验结果和仿真数据,验证了机动性数值模拟分析的可靠性,为后续桨舵融合波浪滑翔机在多样海洋环境中的应用提供了可靠的理论基础。
(文章来自《Ocean Engineering》(2024年第294卷),参考文献略,版权归出版单位与作者所有,用于学习与交流,本文编发已取得授权。)