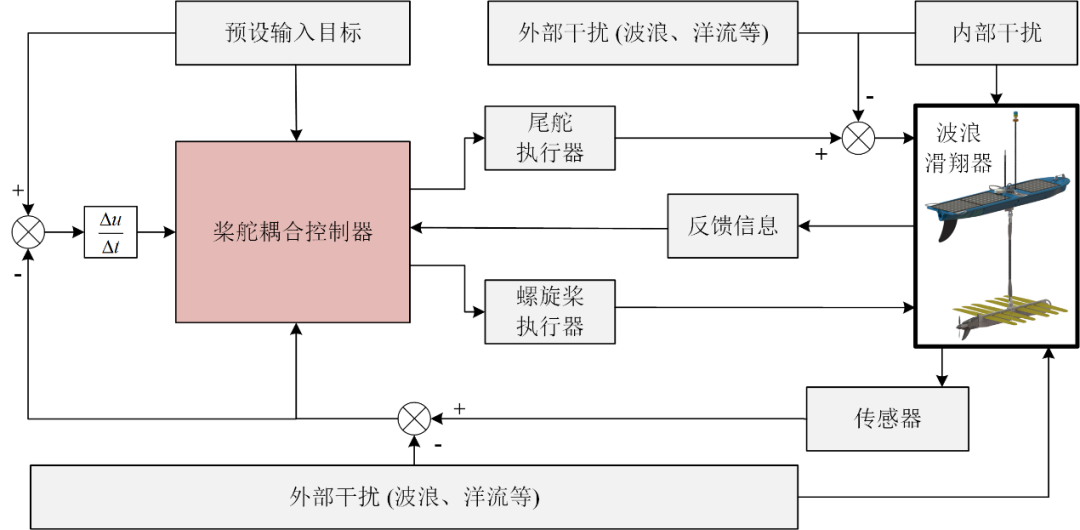
青岛海舟科技有限公司推出的新一代桨舵融合“黑珍珠”波浪滑翔机,相比于传统单舵“黑珍珠”波浪滑翔机,在单舵的基础上额外配备了螺旋桨推进器,构成桨舵耦合控制系统。极大提高了波浪滑翔机的操纵性,而良好的操纵性对于波浪滑翔机的定点锚泊、航向控制和路径跟踪具有重要作用,能够为海洋监测和资源侦查等研究任务提供极大的助力。“黑珍珠”桨舵融合波浪滑翔机不仅可以和波浪滑翔机一样利用波浪能转化为前向驱动力,也能够利用太阳能给导航控制系统和搭载的传感器提供能源,理论上可以实现无限时间和无限范围的海上作业任务。但是“黑珍珠”桨舵融合波浪滑翔机也继承了波浪滑翔机独特的双体结构容易受到干扰的问题,另外还存在尾舵和螺旋桨之间的相互作用,进而产生强烈非线性效应,导致“黑珍珠”桨舵融合波浪滑翔机的控制具有不确定性。本研究通过研究尾舵与螺旋桨之间的耦合作用对“黑珍珠”桨舵融合波浪滑翔机的艏摇运动产生的影响,设计了一种耦合控制器,通过考虑尾舵与螺旋桨之间的耦合作用产生的影响,进而实现高精度航向控制。“黑珍珠”桨舵融合波浪滑翔机是新一代新型海洋观测平台,其上可以搭载气象站、温盐深传感器、铱星通讯模块和水中溶解氧传感器等。浮体船配备的太阳能板用来将太阳能转换为传感器、通讯系统、导航控制系统和水下滑翔机的能源供给。由陆地岸基监控系统传输给波浪滑翔机的通讯系统用以获取目标信息及控制指令。水下滑翔机配备了六对水翼、罗盘和桨舵融合控制系统,主要用以位置获取和方向控制。它们由一条七米长的脐带缆连接,用以上位机与下位机的通信和能源输送,其完整结构如图1所示。首先,通过青岛海舟科技有限公司的岸基监控系统远程发送给“黑珍珠”桨舵融合波浪滑翔机的主控系统目标信息,然后通过视线制导系统将目标点或目标路径信息转化为期望航向信息,传送到本文设计的改进的桨舵耦合控制器,根据目标与本体的偏差,自适应调整螺旋桨和尾舵的输出大小,且能控制其根据不同的目标位置需求输出不同的舵角和螺旋桨转速大小。但是在尾舵和螺旋桨的执行器接收到相应指令后,真实的“黑珍珠”桨舵融合波浪滑翔机在海洋航行的过程,是会有尾舵和螺旋桨的延迟效应,即尾舵和螺旋桨不会立刻达到目标角度或转速,通过传感器采集控制器状态,反馈给桨舵耦合控制器。另外“黑珍珠”桨舵融合波浪滑翔机航行期间存在外部和内部干扰,如:波浪、洋流、机械误差和传感器误差等,造成的航向信息偏差和控制量实际输出偏差,桨舵耦合控制器配备了自适应功能,能够根据外界对“黑珍珠”桨舵融合波浪滑翔机产生的影响,进行自适应调节。如图2所示,为桨舵耦合控制器的控制框架。首先,通过在陆地上测试主控系统搭载桨舵耦合控制器的运算速度,对比传统PID控制器,对桨舵耦合控制器进行评估。表1 不同控制器运算时间
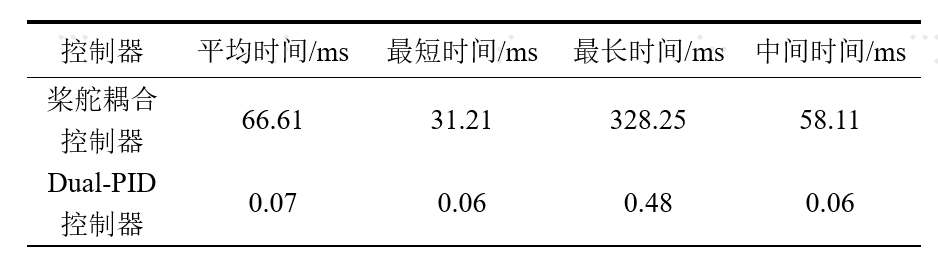
“黑珍珠”桨舵融合波浪滑翔机的控制周期为3s一次,所以桨舵耦合控制器的运算时间可以满足“黑珍珠”桨舵融合波浪滑翔机的控制需求。为了验证本文设计的改进的自适应模型预测控制器的真实有效性、鲁棒性和桨舵耦合控制能力,在青岛近海开展了海试试验。如图3所示,为海试过程,如图4所示,为航向轨迹图,如图5所示为航行数据,航向偏差变化、尾舵舵角变化、螺旋桨转速变化和交叉轨迹误差变化的数据图。
图3 海试过程中的“黑珍珠”桨舵融合波浪滑翔机
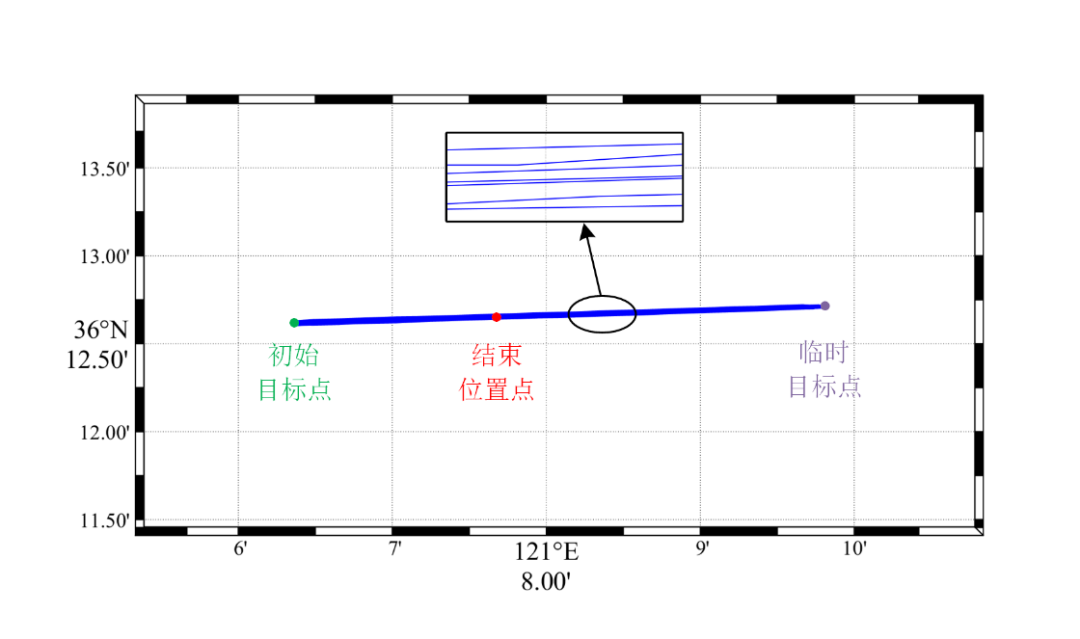
图4 “黑珍珠”桨舵融合波浪滑翔机航行轨迹

图5 “黑珍珠”桨舵融合波浪滑翔机海试数据
如图6所示,为搭载传统控制器的波浪滑翔机航行轨迹。如图7所示为搭载传统控制器的波浪滑翔机航行数据。
图6 搭载传统控制器的波浪滑翔机航行轨迹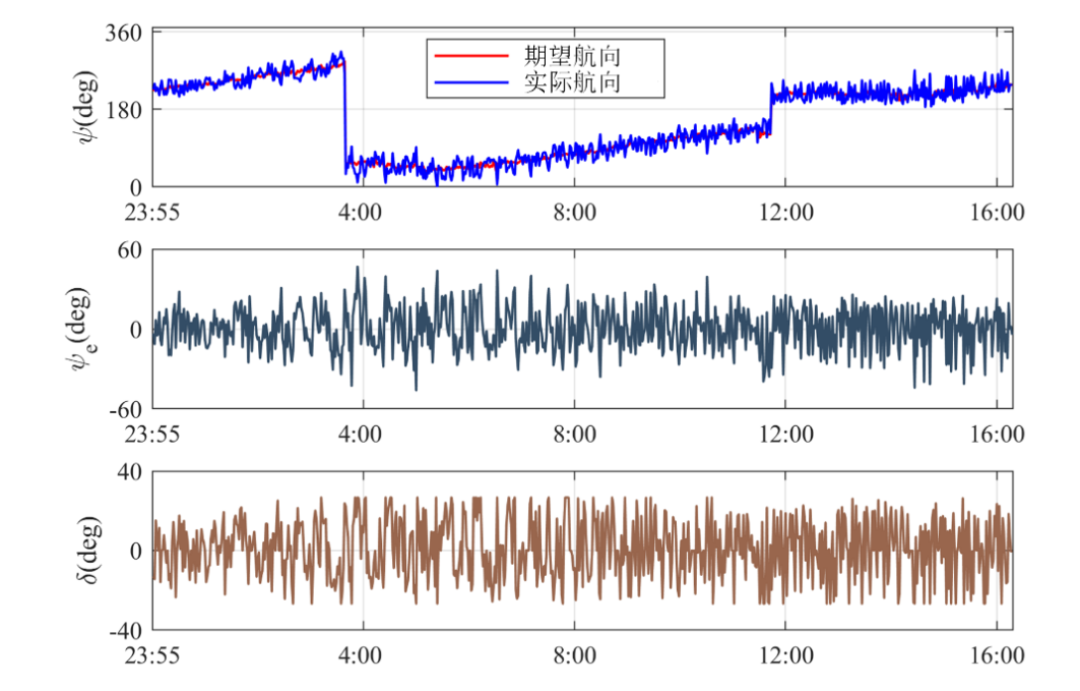
图7 传统控制器的波浪滑翔机航行数据通过与以往的波浪滑翔机航行数据对比,可以看出桨舵耦合控制器在保证航向控制精度的同时,并在开启螺旋桨的过程中,其舵角变化幅度和频率明显减少,这表明改进的自适应模型预测控制器具有优秀的尾舵和螺旋桨的耦合控制能力。本研究解决了新一代“黑珍珠”桨舵融合波浪滑翔机的控制器耦合性差问题,通过研究尾舵和螺旋桨之间的耦合作用,设计出根据不同控制需求,自适应控制舵角大小和螺旋桨转速大小,实现在较好海况下,减少螺旋桨的使用,降低能耗,在恶劣海况下,通过螺旋桨的辅助控制,实现高精度跟踪控制。(文章来自《Ocean Engineering》(2023年第289卷),参考文献略,版权归出版单位与作者所有,用于学习与交流,本文编发已取得授权。)