一、试验目的
实现南海海域台风要素实时观测,与卫星遥感数据或浮标观测数据进行对比分析,确定波浪滑翔器台风要素观测的准确性和有效性。同时,验证波浪滑翔器在台风环境下的生存能力和运行状态。
二、海试前期准备
⒈海试区域及运输设备
“黑珍珠”号大型波浪滑翔器观测海区位于汕头东南方向180公里附近的南海海域,具体位置如图1所示。
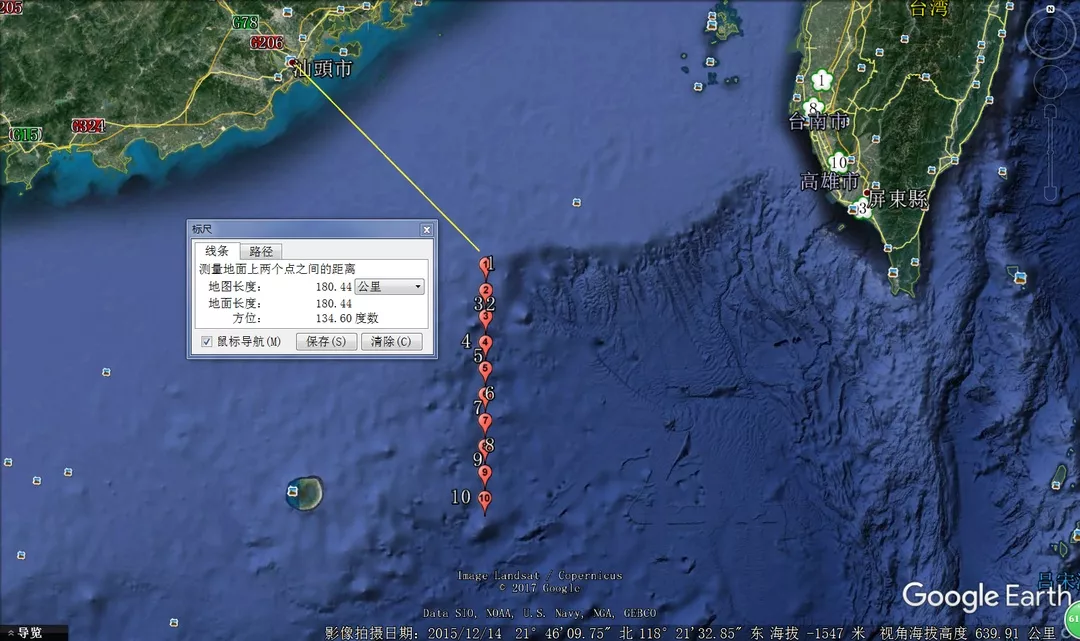
图1 试验海区示意图
“黑珍珠”号大型波浪滑翔器目标点共计10个,具体目标点经纬度如表1所示。
表1 路径点经纬度坐标
序号 | 经度 | 纬度 |
WYPT-00 | 118.0000 | 22.0000 |
WYPT-01 | 118.0000 | 21.8400 |
WYPT-02 | 118.0000 | 21.6800 |
WYPT-03 | 118.0000 | 21.5200 |
WYPT-04 | 118.0000 | 21.3600 |
WYPT-05 | 118.0000 | 21.2000 |
WYPT-06 | 118.0000 | 21.0400 |
WYPT-07 | 118.0000 | 20.8800 |
WYPT-08 | 118.0000 | 20.7200 |
WYPT-09 | 118.0000 | 20.5600 |
海上试验平台为湛江科调船,如图2所示。

图2 “黑珍珠”波浪滑翔器海试试验船
⒉参试设备
参试设备为“黑珍珠”号大型波浪滑翔器,其三维模型如图3所示,该中型波浪滑翔器的具体性能指标参数如表2所示。
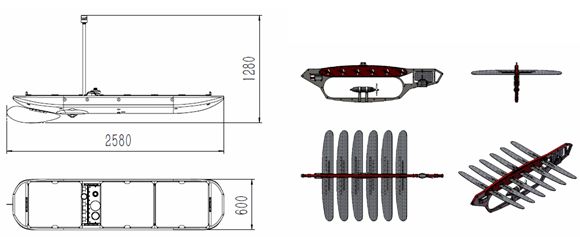
图3 “黑珍珠”波浪滑翔器三维模型
表2 小型波浪滑翔器指标参数
分类 | 指标 |
平台质量 | 双体结构总质量80kg |
平台尺寸 | 水面母船:2.5m×0.6m×0.2m 水下滑翔机:1.8m×1.2m×0.5m(6对水翼) |
续航能力 | 最大航行距离>1万公里;连续工作时间>1年 |
运动速度 | 最大航行速度:SS1:≥1.0kts,SS4:≥1.7kts 长期大范围平均航行速度:≥1.7Kts |
风浪等级 | 高级版本可以抵抗12级台风,最大可生存浪高10米(工业级和军工级) |
定位精度 | 3级海况(海流〈0.5Kts): 24小时内虚拟锚泊定点误差<200m半径概率≥50% 24小时内直线路径跟踪偏差<200米概率≥80% |
发电功率 | 峰值发电功率约为180W,长期平均功率≥20W |
负载能力 | 额外电能负载15W×12V,额外结构负载20kg×18L |
蓄电储备 | 标准配置:连续无光工作时间3天 高级配置:最大连续无光工作时间15天 |

图4 集成波浪传感器和ADCP的“黑珍珠”波浪滑翔器
表3 “黑珍珠”波浪滑翔器搭载传感器列表
序号 | 名称 | 型号 | 参数 | 厂家 |
1 | AirMar气象站 | NMEA 0183-200WX | 电压输入:9-40VDC 电流:100mA 数据传输方式:RS232 | 美国Airmar 技术公司 |
2 | ADCP | RIV-600 | 数据传输方式:RS232、网口等 工作频率:600KHz 最大测流距离:70m 测流范围:±10m/s 流速精度:±0.25%±2mm/s 最大底跟踪:120m/s 底跟踪精度:±0.25%±2mm/s 层厚:0.5m-4m 层数:1-128层 数据更新率(典型值):1Hz | 中科院声学所 |
三、海试过程
海试过程主要包括码头联机测试、设备布放与实时状态监测,以及回收四个阶段。
⒈码头联调
2018年8月16日上午5:30,在湛江附近海域码头开展码头联机测试工作,主要检查备航情况、样机陆上装配及调试情况,并强调了作业安全问题。设备装载到船上以后进行了各功能的测试,保证状态无误以后,开始起航,航行轨迹如图5所示。
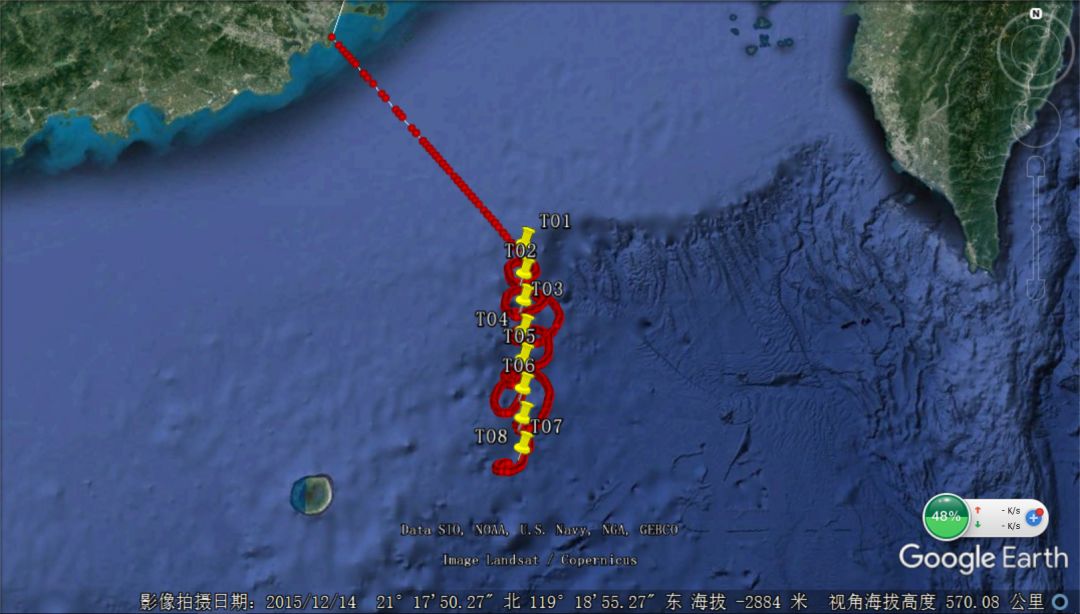
图5 波浪滑翔器布放行船轨迹
⒉设备布放
2018年8月17日晚上17点30分,试验船从崂山码头出发,行驶大约1天到达目标海域,经纬度为(118°00'00.00,22°00'00.00),在该处布放“黑珍珠”号波浪滑翔器。波浪滑翔器的布放现场照片如下所示。

图6“黑珍珠”号波浪滑翔器布放过程
布放完成后,通过岸基监控系统存储铱星回传的数据分析平台的运行状态及其搭载传感器后的可行性。通过铱星回传的数据包括波浪传感器数据。
⒊系统回收
2018年9月2日18:31,“黑珍珠”波浪滑翔器完成台风观测任务,并成功完成回收。

图7 “黑珍珠”号波浪滑翔器回收完成
⒋远程监控
海上的轨迹和数据可以显示如下:
图8 “黑珍珠”波浪滑翔器轨迹岸基监控软件显示
四、航行状态数据分析
⒈累计航程
2017年8月9日5时46分至2017年8月31日0时6分共610小时波浪滑翔器试航的航行轨迹如图9所示,起始位置为(120.6778°E,36.23009°N),结束位置为(117.9091°E,20.70507°N)。
此次海试610小时累计航程为4402.8870 km,如图10所示,累计航程的变化趋势可以分为4段,其中8月9日至8月16日8天时间的累计航程为250km左右,8月16日至8月17日航程增长速度较快,此时间段内为路上运输阶段,并非海试阶段,8月17日至9月2日为南海海试阶段,累计航程增长速率与第一阶段近似,9月2日之后波浪滑翔器累计航程增长速率增大,此时已经上岸,为陆上运输阶段。
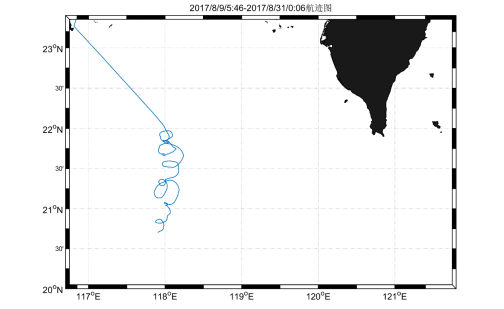
图9 海试全程航迹图
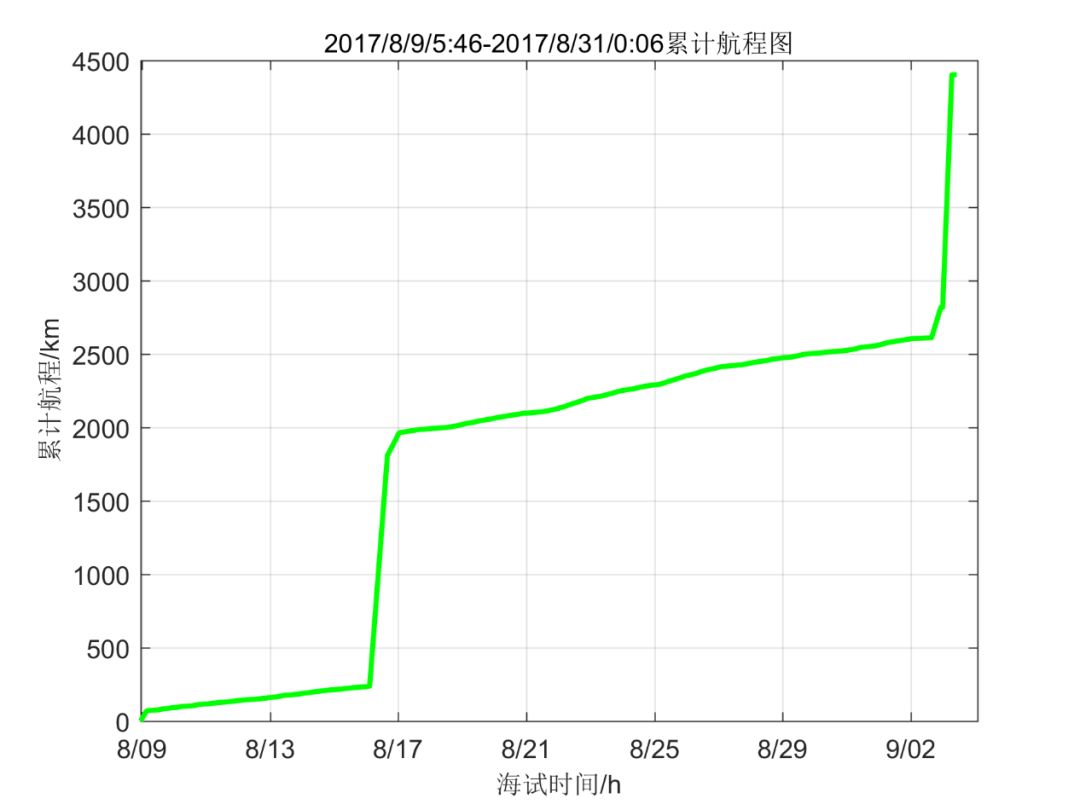
图10 海试全程累计航程图
⒉速度
图11为该海试时间内波浪滑翔器航行速度图,图中散点为原始数据,蓝线是平滑处理后绘制的曲线(平滑视窗为21,即每点的数值为其本身即相邻20点数值的均值,其余航行状态数据图绘制方法相同)。从图中可以看出,整个海试时间的航行平滑速度变化范围为0.1-1.1m/s,实际航速的变化范围为0-2m/s。根据速度大小可以分成两段,8月9日至8月16的航行速度明显大于8月17日至9月2日期间的航行速度,其中前半段的平均速度约为0.3m/s,后半段的平均速度约为0.5m/s。从表4中得到海试全程的平均速度为0.4149m/s,速度方差为0.0864m2/s2。
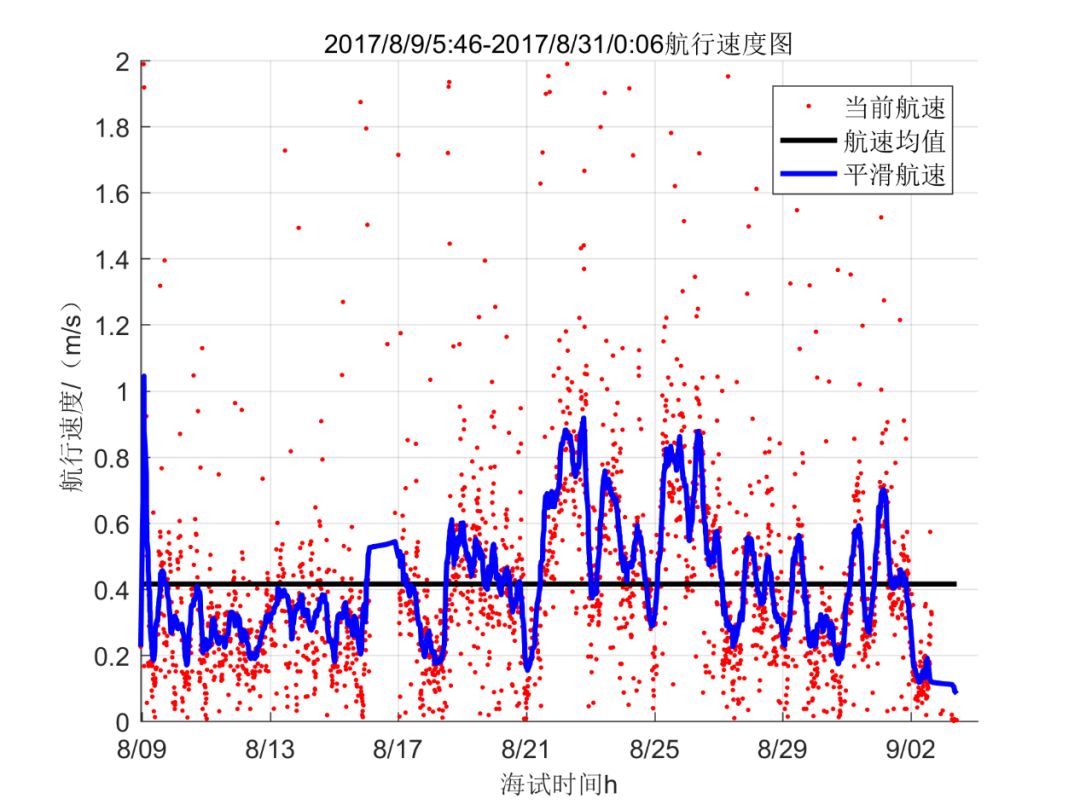
图11 海试全程航行速度图
表4 航程及航速统计量
时间段 | 航程(km) | 平均速度(m/s) | 速度方差(m2/s2) |
海试全程 | 4402.8870 | 0.4149 | 0.0864 |
⒊航向
图12为波浪滑翔器当前航向与期望航向的对比图,从图中可以看出在整个时间段内当前航向与期望航向的吻合程度很高,在大部分海试时间内实际航向基本与期望航向达到一致,在8月9开始海试阶段波浪滑翔器的当前航向与期望航向的吻合程度较差,且相差角度明显,在9月2日即将结束海试的时间段内当前航向与期望航向吻合程度较差,不排除人为因素的影响,在8月10日至9月1日的时间段内,除8月18日当前航线与期望航向发生较大偏差,在其余时间内当前航向与期望航向的吻合程度很高。
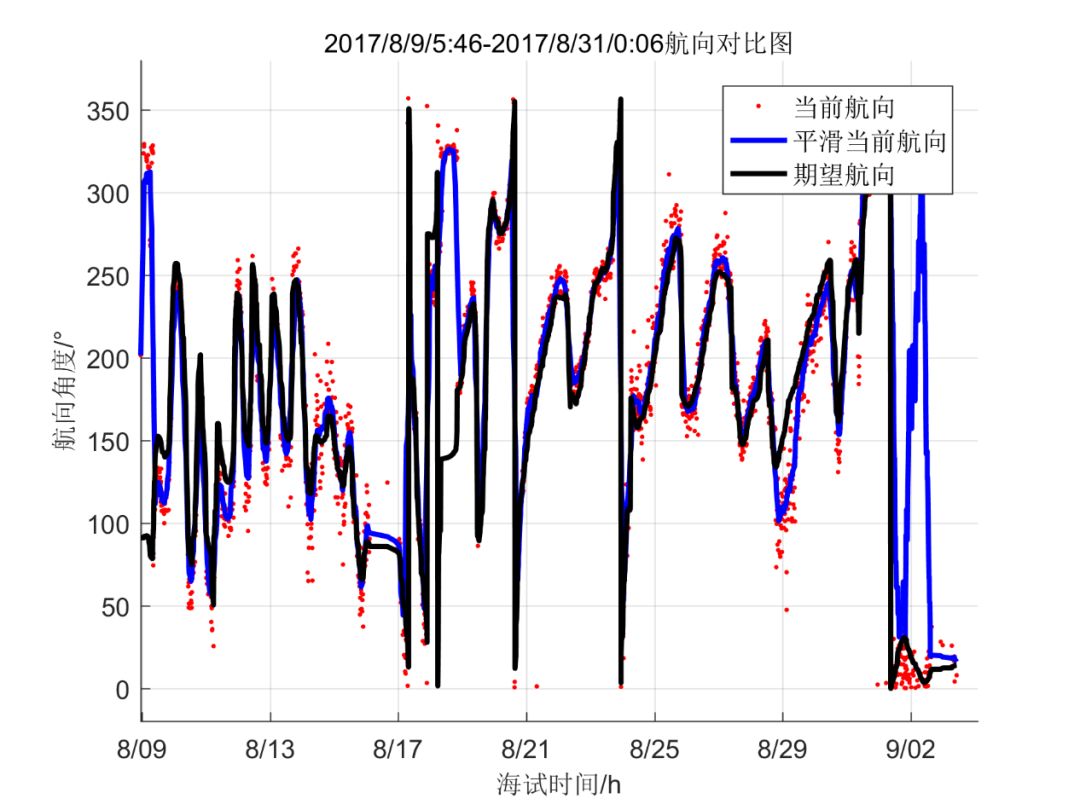
图12 海试全程航向对比图
⒋航向偏差
图13为航向差图,从图中可以看出,在整个海试的大部分时间段内的期望航向与实际航向的差值基本上在-30°至50°的范围内,少数时间点航向差较大;在8月9日至8月17日时间段内的期望航向与实际航向的差值基本上在-20°至30°的范围内,且在此时间段内的航向差正向偏差占主导;8月17日至8月18日,航向差出现异常,从-50°变化至180°;8月18日至9月2日,航向差变化范围为-20°~-50°,且负向偏差占主导。从表5可以得到,在整个海试时间610小时内的航向差(期望航向与实际航向的差)均值为7.7187°,方差为1313.4093σ2,其中正航向差(期望航向与实际航向之差为正)的百分比为50.0563%,负航向差的百分比为43.9437%。造成航向差的方差如此大的部分原因可能是8月9日开始阶段及8月17日陆上运输阶段的航向差较大。
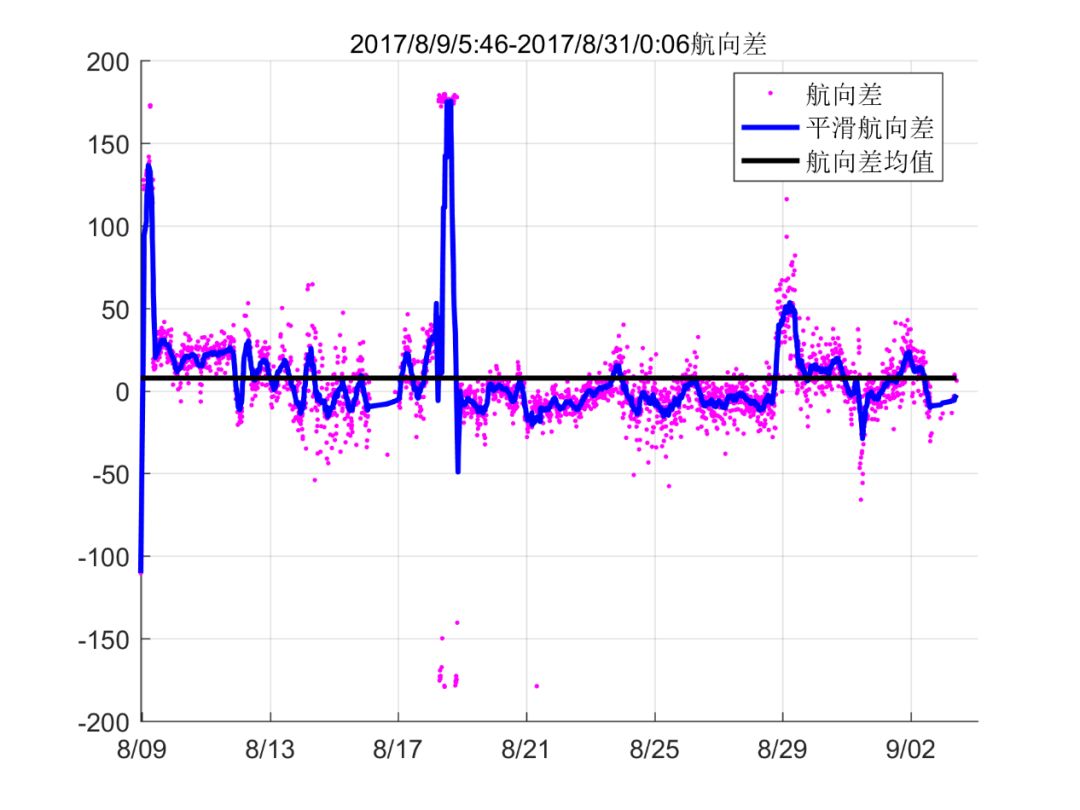
图13 海试全程航向差图
表5 航向差统计量
时间段 | 航向差均值(°)(=期望-实际) | 方差 (m2/s2) | 正航向差 百分比 | 负航向差百分比 (期望-实际<0) |
海试全程 | 7.7187 | 1313.4093 | 50.0563 | 43.9437 |
⒌俯仰
图14是本次海试过程中波浪滑翔器海试全程俯仰图,俯仰均值较小,接近零度;绝大多数俯仰角在-10°-20°之间波动,这表明波浪滑翔器在海试过程中俯仰角度较小,仪器姿态较为平稳。
表6是海试全程俯仰数据的统计量,海试全程俯仰均值为0.0061°,均值较小;海试全程俯仰方差为127.3567σ2,就俯仰而言,俯仰角偏离均值的程度较小;海试全程平均仰角为8.6261°,海试全程平均俯角为-7. 5771°,平均来看,俯角比仰角要小,但二者都较小。综合来看,海试过程中,波浪滑翔器的俯仰较小,波动较小。
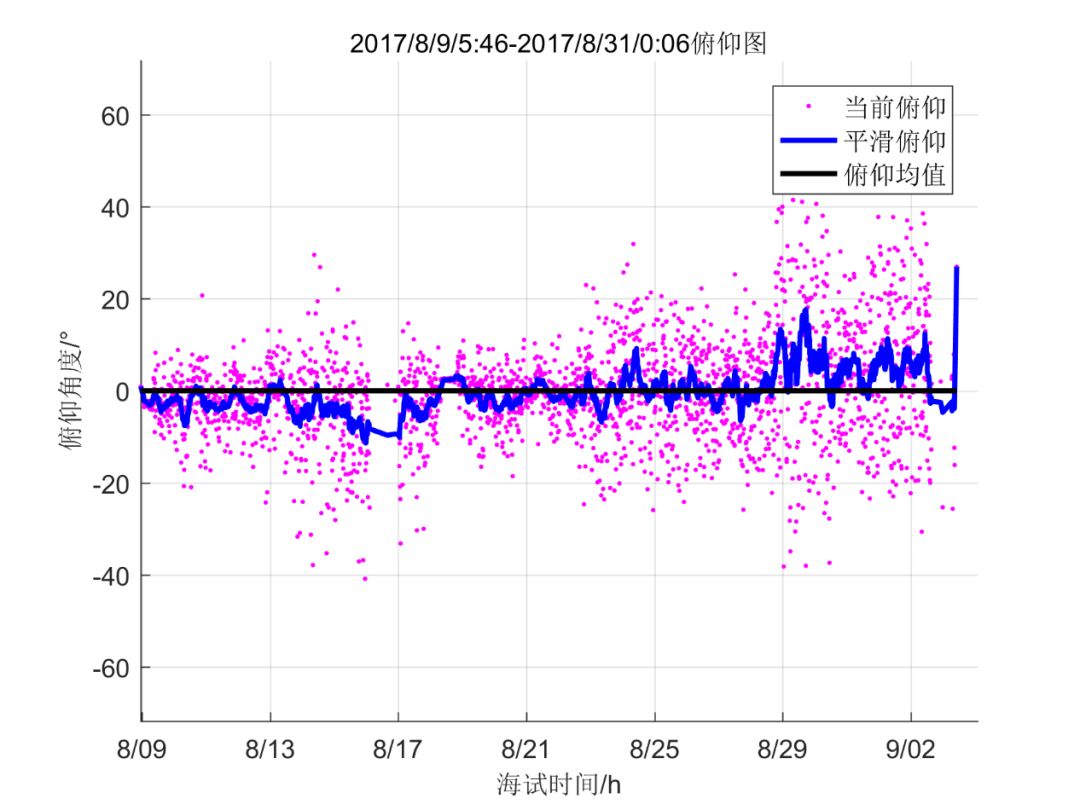
图14 海试全程俯仰图
表6 波浪滑翔器俯仰统计量
时间 | 平均俯仰角度(°) | 方差(m2/s2) | 平均仰角 (°) | 平均俯角 (°) |
海试全程 | 0.0061 | 127.3567 | 8.6261 | -7.5771 |
⒍横滚图及其统计量
图15是本次海试过程中波浪滑翔器海试全程横滚图,横滚均值较小,接近零度;绝大多数横滚角在±10°之间波动,这表明波浪滑翔器在海试过程中横滚角度较小,仪器姿态较为平稳。
表7是海试全程横滚数据的统计量,海试全程横滚均值为2.1285°,均值很小;海试全程横滚方差为69.0374σ2,就横滚而言,横滚角偏离均值的程度很小;海试全程平均正横滚角为5.5149°,海试全程平均负横滚角为-3.7938°,平均来看,负横滚角与正横滚角大小相当,但二者都很小。综合来看,海试过程中,波浪滑翔器的横滚很小,波动很小。
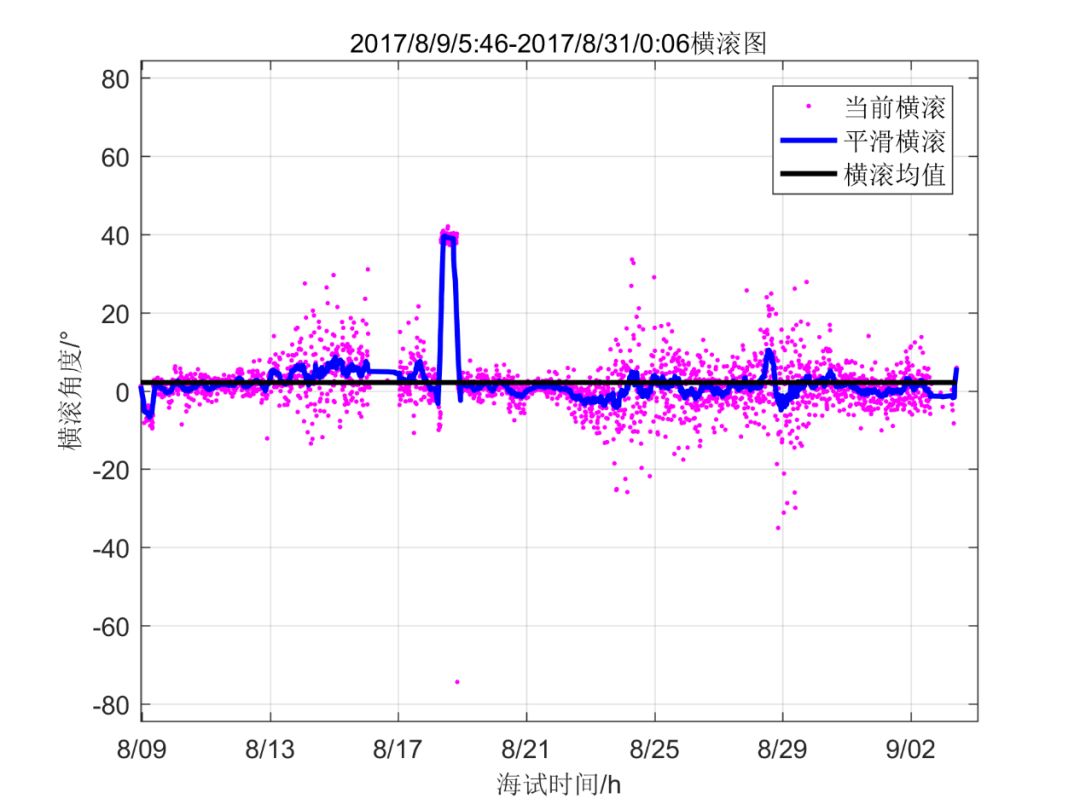
图15 海试全程横滚图
表7 波浪滑翔器横滚统计量
时间 | 平均横滚角度(°) | 方差 (m2/s2) | 平均正横滚 (°) | 平均负横滚 (°) |
海试全程 | 2.1285 | 69.0374 | 5.5149 | -3.7938 |
⒎电压
图16是本次海试过程中波浪滑翔器海试全程电压图,电压均值在16.9V左右;海试开始是电池电压较高,正常工作后,经历了先充电后放电电的过程,随后电压呈现规律性变化,在16.5V到17.5V之间上下波动,海试结束之前为长时间放电过程;电压值的变化显示了明显的周期性,随着日出日落,太阳辐射强度周期性变化,从而导致电压周期性变化;每天的电压充放电幅度不一致,主要是每日的太阳辐射强度不一致。
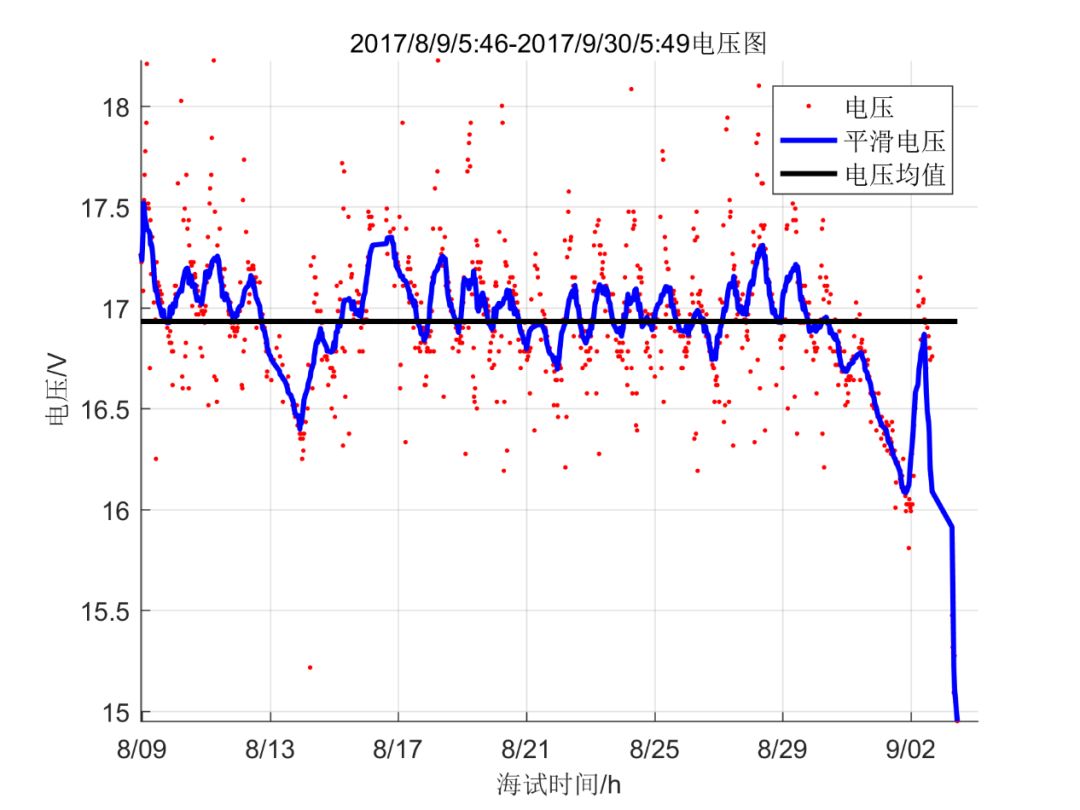
图16 海试全程电压图
表8是海试全程电压数据的统计量,每日净充电时间基本一致,约为10.4小时,每日净放电时间也接近这一值,表明整个海试过程中滑翔器电压稳定,电池性能可靠;海试全程电压平均上升幅度可达1376mV。综合来看,整个海试过程中,电压变化较为平稳,具有一定的规律,电池性能可靠。
表8 波浪滑翔器电压统计量
时间段 | 充电电压上升幅度(mv) | 净充电时间 (小时) | 净放电时间 (小时) | 平均每天净充电小时数(小时/天) |
海试全程 | 1375.8000 | 260.9500 | 303.7833 | 10.4380 |
五、波浪数据分析
波浪数据的比对方法是将海试过程中滑翔器测得波浪数据与欧洲中期天气预报中心下载的ERA Interim数据集中的有效波高和平均波周期进行比对。时间上,将相应时刻的波浪滑翔器数据与数据集这一时刻观测海域的要素均值进行对比;空间上,由于波浪滑翔器观测路径趋于直线,插值得到的空间分布不具有代表性,因此用散点图来描述观测要素随观测路径的变化情况。
ERA Interim数据集是通过对气象站数据、卫星数据同化处理后得到的再分析数据,提供1979年1月到当前的数据,并且持续更新,数据的空间分辨率为0.125°,时间分辨率为六小时平均。下载路径为:http://apps.ecmwf.int/datasets/data/interim-full-daily/levtype=sfc/。
图17是由20178年8月17日至9月3日波浪滑翔器测得有效波高、周期与ERAInterim数据集对应数据绘制的过程曲线对比图,其中ERA Interim数据集的数据取观测海域的均值,波浪滑翔器取实时数据。对比来看,两种数据的有效波高存在明显差距,主要原因是波浪滑翔器反映的是单点有效波高随时间的变化情况,且数据点位置随时间变化,而数据集反映的是观测海域有效波高均值随时间的变化情况,因此,波浪滑翔器的变化幅度必然要比数据集剧烈;从均值来看,两种数据有效波高的均值十分接近。平均波周期的观测对比结果与有效波高类似。这表明波浪滑翔器整个观测过程得到的观测海域的波浪数据与ERA Interim数据集再分析数据基本一致,差距较小。

图17 海试全程有效波高、平均波周期过程曲线
图18是海试全程波浪滑翔器测得有效波高空间散点图,有效波高变化具有连续性,没有出现突变,变化范围较小,与有效波高过程曲线保持一致。图19是海试全程平均波周器空间散点图,变化情况类似。总体来看,波浪数据是基本可信的。
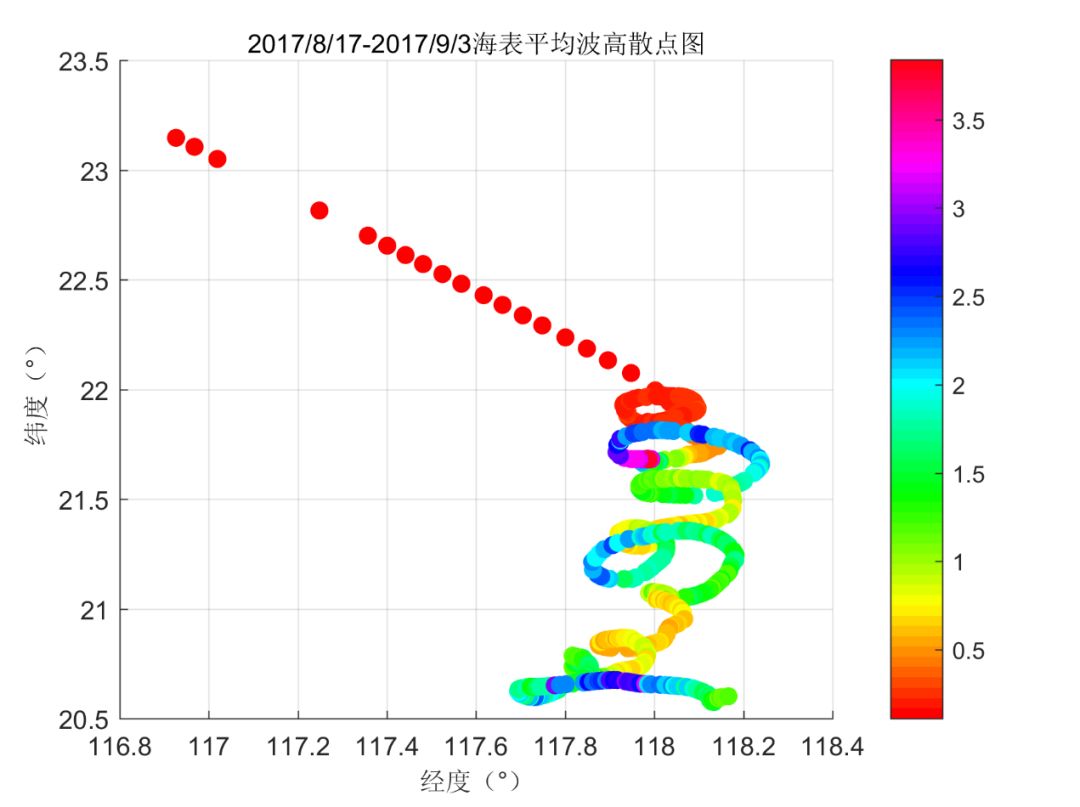
图18 海试全程有效波高空间散点图
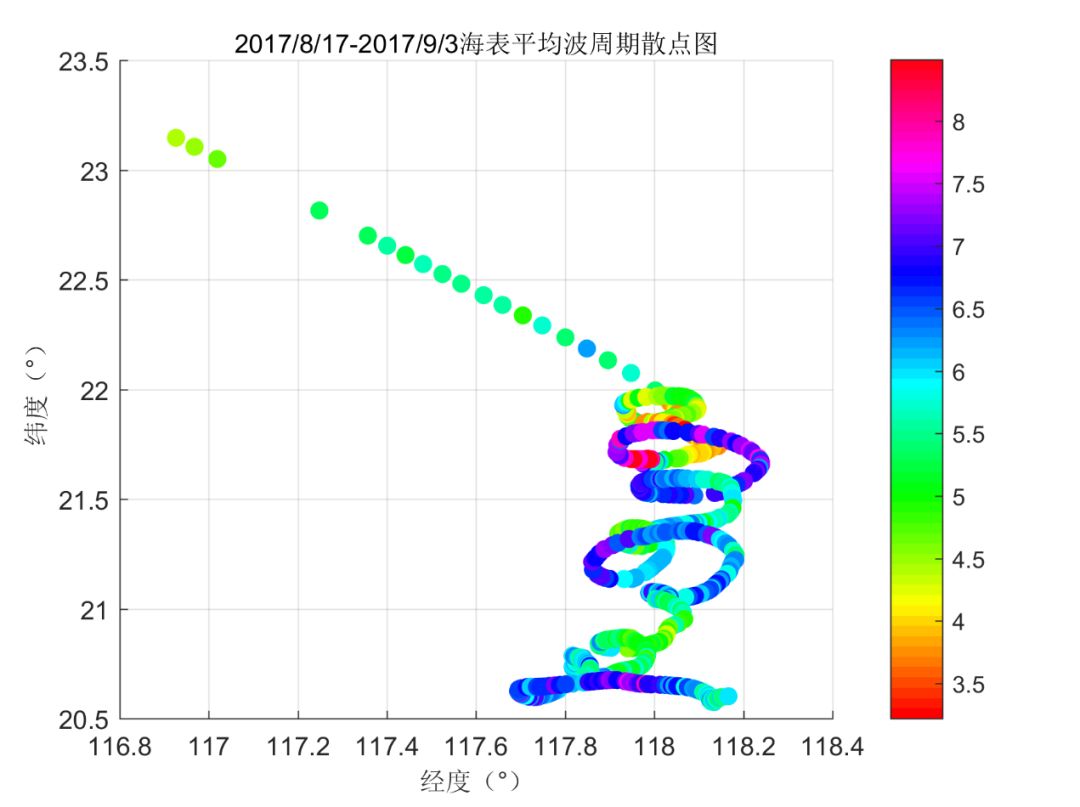
图19 海试全程平均波周期空间散点图
六、海试总结
⑴本次海试过程中,波浪滑翔器自身状态稳定,能够达到观测要求。本次海试时长620小时,累积航程为760 km,波浪滑翔器续航能力持久;海试全程均速0.4149m/s,波动幅度小,波浪滑翔器航行速度稳定;还是全程当前航向与期望航向差值均值为7.7187°,波动不超过±50°,波浪滑翔器基本能够按照预定航向航行;波浪滑翔器俯仰和横滚的均值及波动都较小,波浪滑翔器在海试过程中姿态平稳;波浪滑翔器在海试过程中,电压呈现预期的合理周期性,稳定可靠。仪器各参数显示波浪滑翔器的总体性能良好,是一个稳定的海面观测平台。
⑵波浪滑翔器测得波浪数据基本可信。综合数据反应的时空特征、观测时间、观测海域、观测方式等因素来看,波浪滑翔器测得波浪数据基本可信。