【按语】《海洋生态大讲堂》邀请中国海洋大学、海洋国家实验室孙秀军教授于1月27日 晚上20:00-22:00做讲座,题为“‘黑珍珠’波浪滑翔器海上观测应用试验”。现将讲座内容整理如下,以飨广大群友。提醒注意,引用时请标注来源与作者版权。
2017年一整年,一致忙着进行863计划课题的海上试验验收工作,很少出来跟大家交流。好在,经过大家的共同努力,课题组最近完成了波浪滑翔器的海上第三方验收工作。
今天,借此机会向大家汇报下863课题《混合驱动自主巡航波浪滑翔器观测系统》的海上试验情况,希望大家多多指导!
波浪滑翔器具有四个特点:
利用波浪能和太阳能,可以实现一年一万公里航行;
具有GPS定位、罗盘和转向机构,可以实现自主导航;
按照划定路径巡航或者长期保持在某坐标位置监测;
具有极大的负载能力,搭载各种声光电传感器。

当前,美国有这两款波浪滑翔器,一个大型,一个中型,我们863课题研制的波浪滑翔器是美国大型波浪滑翔器。课题研制的“黑珍珠”波浪滑翔器如图所示。

以下是“黑珍珠”波浪滑翔器的海试照片。
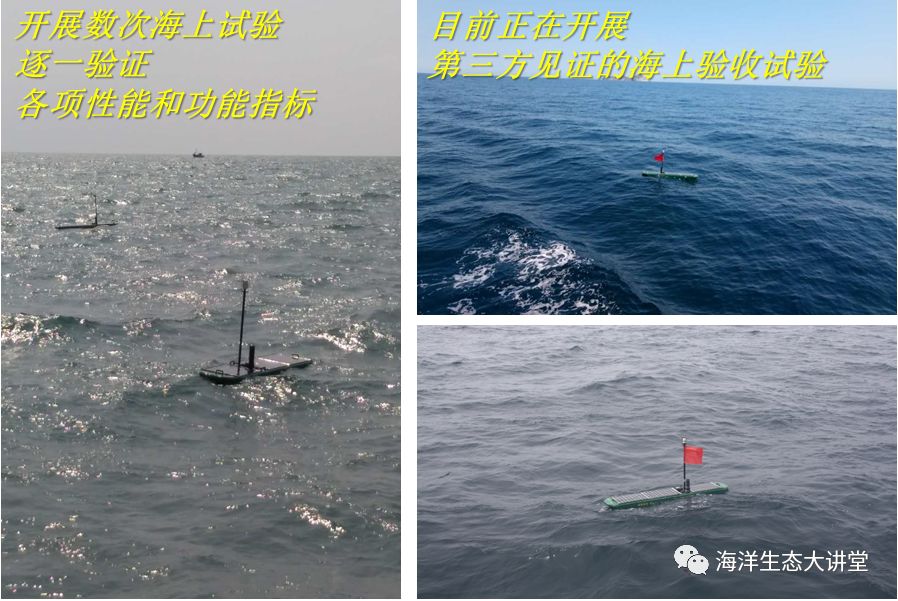
863计划课题海上试验,采用第三方见证验收,有专家组全程跟踪。
整个验收过程需要三次试验:分别在青岛进行长航程试验、在南海进行极端海况测试,在青岛进行单项性能指标测试。

2016年5月22日,专家浙江大学徐文教授和中船重工710所王绪军跟随上船见证试验。
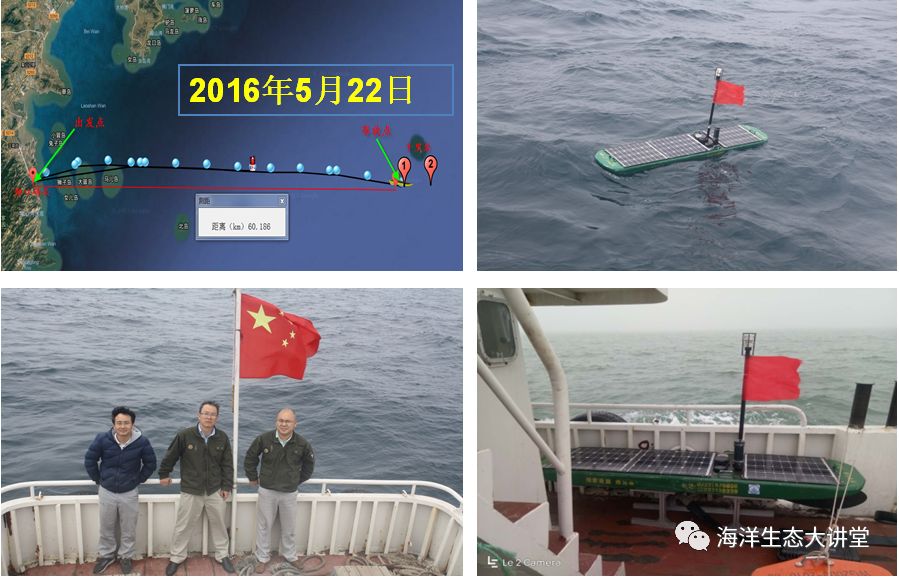
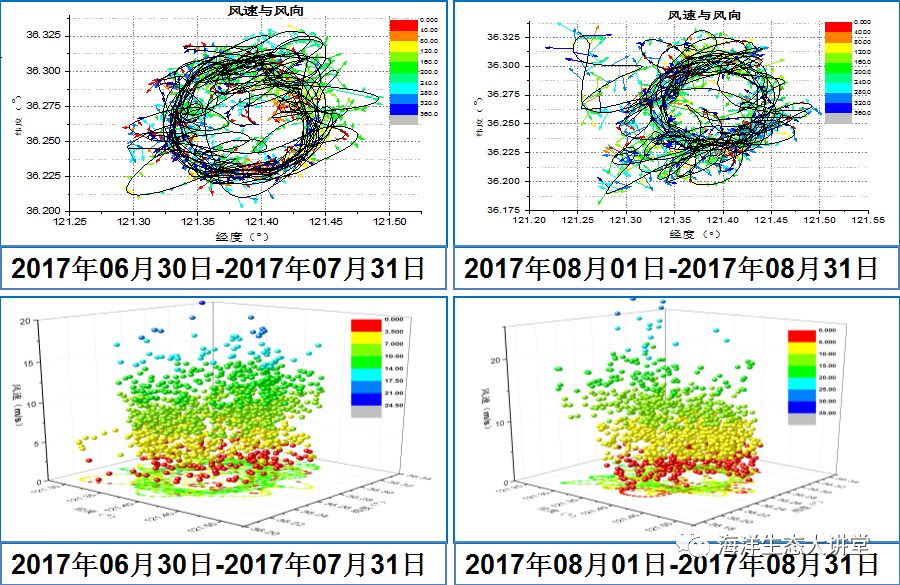
从青岛仰口风景区雕龙嘴码头出发,经过60公里的航程,到达千里岩岛南端,然后进行布放。长航程试验的“黑珍珠”波浪滑翔器搭载了气象站、温盐传感器。
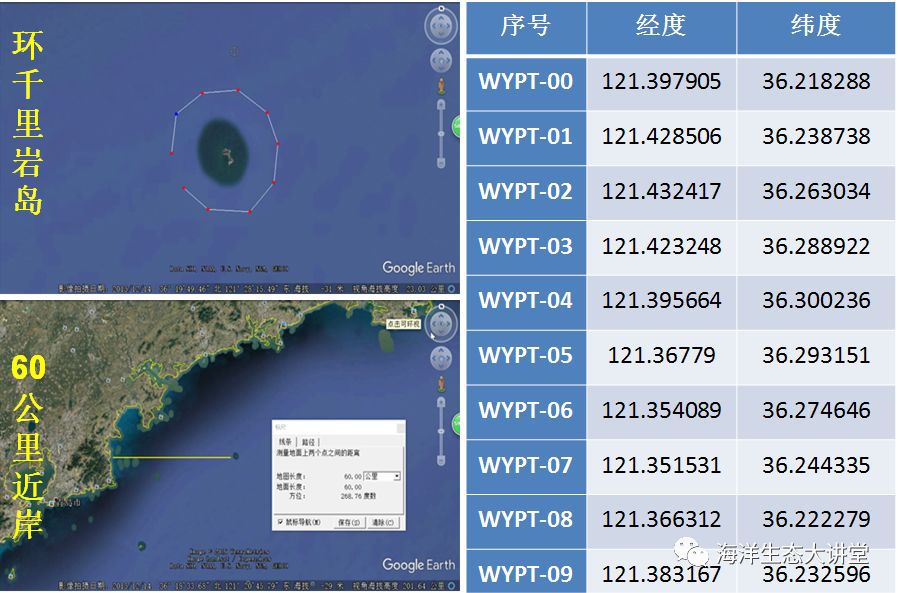
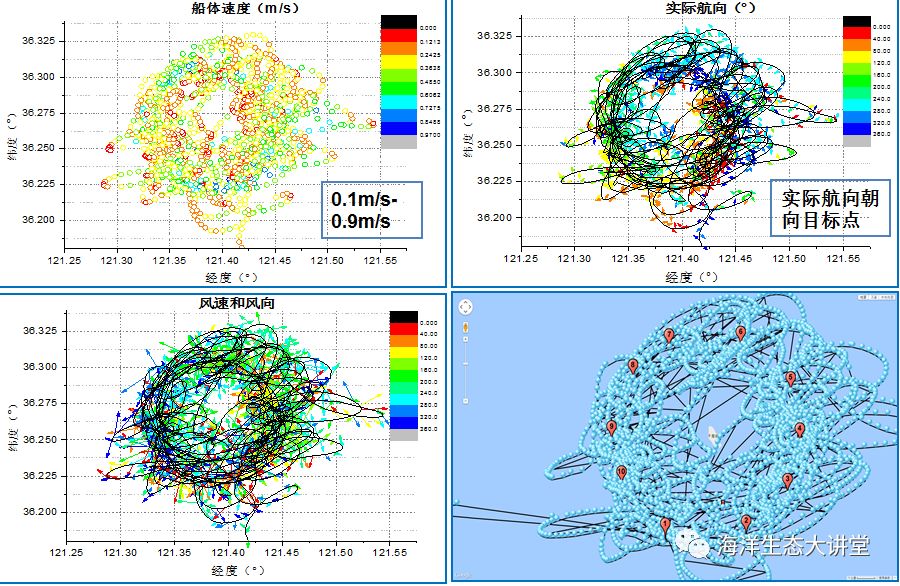
波浪滑翔器环绕千里岩岛进行长期运行。
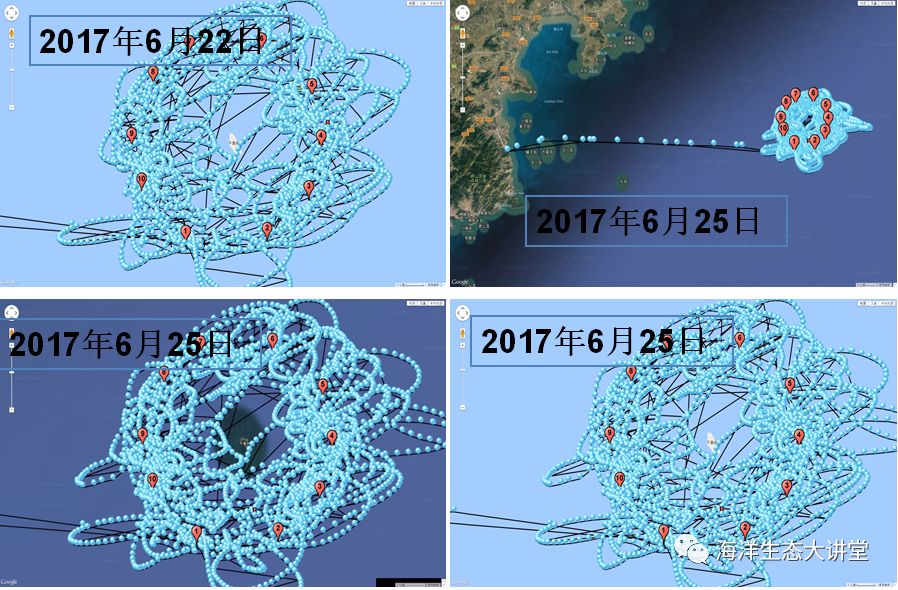
波浪滑翔器是按照预先设定的环形路径自主导航的,时间一天一天过去,波浪滑翔器围绕千里岩岛画出了秘密麻麻的轨迹。
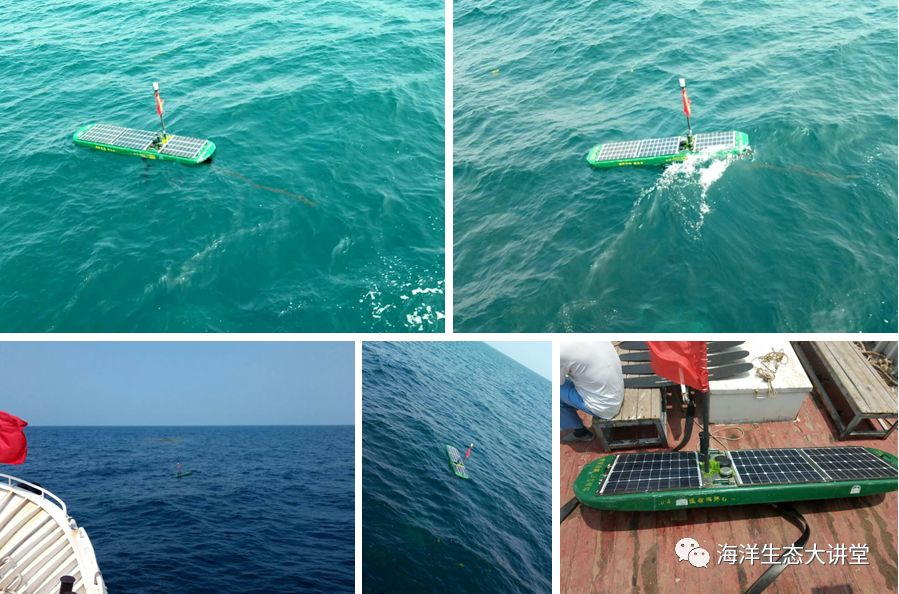
黑珍珠波浪滑翔器在海上跑航时的照片。青岛千里岩海域的风景非常优美。

波浪滑翔器是一种水面无人船,他利用了海洋的波浪作为前进的动力,利用了太阳能电池板来发电,可以实现长期的航程航行,完成一年一万公里的连续航程。这是它的独到之处。
现在,波浪滑翔器还没有按照摄像头,因为,目前的卫星通讯方式,还不能实现图片和视频等大数据量的远程传输。相对来说,增加摄像头的实用意义就小了很多。在青岛千里岩海域进行的环岛长航程第三方见证试验,开展比较顺利。
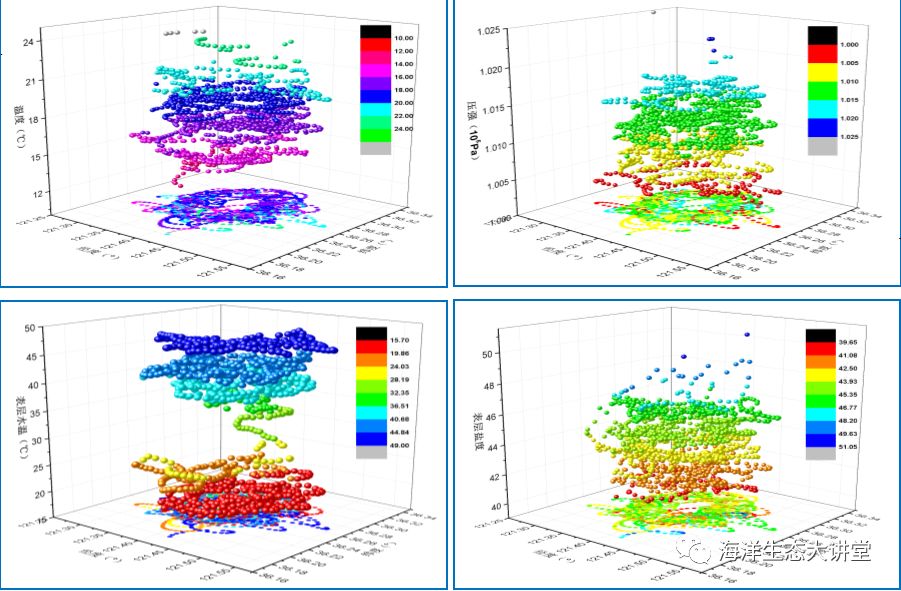
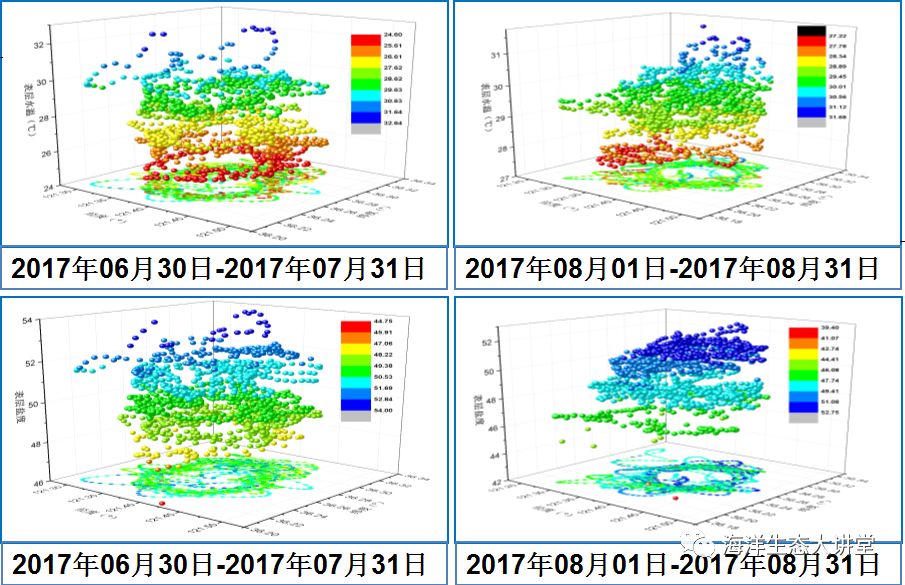
时间一天一天过去,课题组也是十分担心机器会出现故障,不能实现课题验收,远程监控基站设置在海洋国家实验室。气象、水文要素实时回传,时间间隔是15分钟。气象要素有气温、气压、风速、风向等;水文要素有水面温度和水面盐度。

这是布放之前,黑珍珠波浪滑翔器的近距离照片。
这个大型的黑珍珠波浪滑翔器具有三块太阳能电池板,具有峰值180瓦特的发电功率,可以驱动用电功率较大的海洋监测仪器设备。而且,这个大型平台具有很高的波浪动力转换能力,可以拖拉较重的拖曳装置。
“黑珍珠”波浪滑翔器的课题考核指标如下 :
最大航行距离:>4000km,连续工作时间:>180 天;
最大航行速度:1 级海况下≥0.25m/s;4 级海况下≥0.6m/s;
定位精度:24 小时内虚拟锚泊定点误差小于 1000 米半径概率≥50% (3 级海况,海流<0.25m/s);
航行精度:24 小时内直线路径跟踪偏差小于 1000 米概率≥80%(3 级海况,海流<0.25m/s);
可生存浪高 6 米(最大浪高 H1/10);
可搭载载荷:除指南要求的基本载荷外,还具备不低于 20 千克的搭载余量;
海水表层温度、盐度、流场以及海气界面风、温、湿、气压等环境参数的连续走航测量。
863课题任务书要求的研究目标如下:
——利用太阳能发电
——利用波浪能实现推进
——螺旋桨辅助推进
——卫星通信、定点虚拟锚泊、路径自动跟踪
——海表温度、盐度、流场以及海气界面风、温、湿、气压等走航测量
——提交工程样机2台
——续航4000公里,工作时间180天
——提交海上实时监测水文气象数据
目前,机器的售价因为型号大小、配置不同、以及传感器不同而不同。
市场售价约120万元/台。

按照要求,这次环千里岩岛试验需要进行180天,然而,由于休渔期结束,打鱼的渔民出海了。在2017年8月31日早上7点38分,渔船将长航程波浪滑翔器拖向烟台的码头,码头距离试验区域有40公里左右,码头坐标为(经度:121.2339,纬度:36.68599)。

渔民把波浪滑翔器带回了自己家,拆解了。
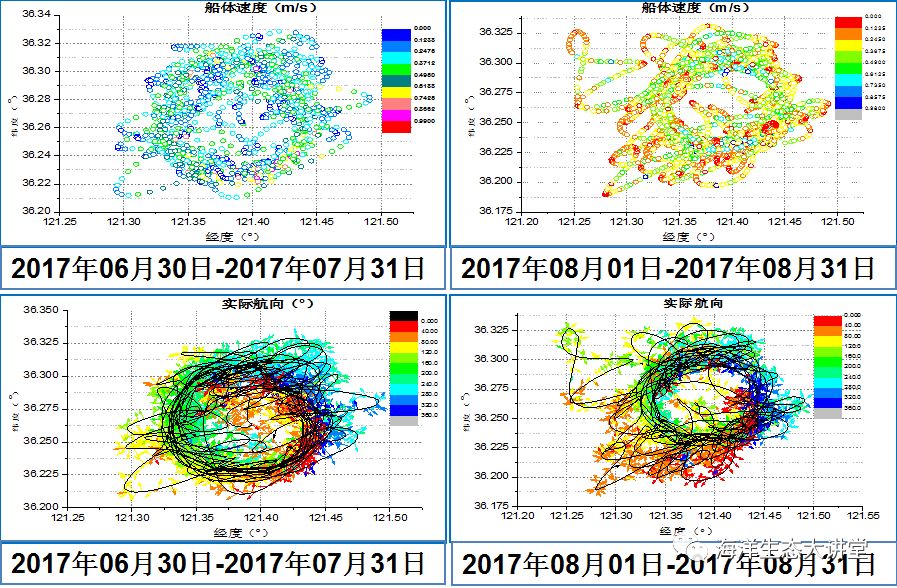
波浪滑翔器环千里岩航行过程中,实时监测并远程回传了大量的数据.
长航程测试波浪滑翔器因渔民破坏而中止,这个过程中稳定运行了99天,累计航程约3595公里,平均航行速度0.42m/s。
第三方见证长航程验收海试:
加装气象站完成气象参数(气温、气压、风速、风向)的观测;
加装温盐传感器完成了水文参数(水温、盐度)的观测;
接下来,讲一下南海台风观测试验。选择试验地点在台湾设置锚系浮标的西北海域。
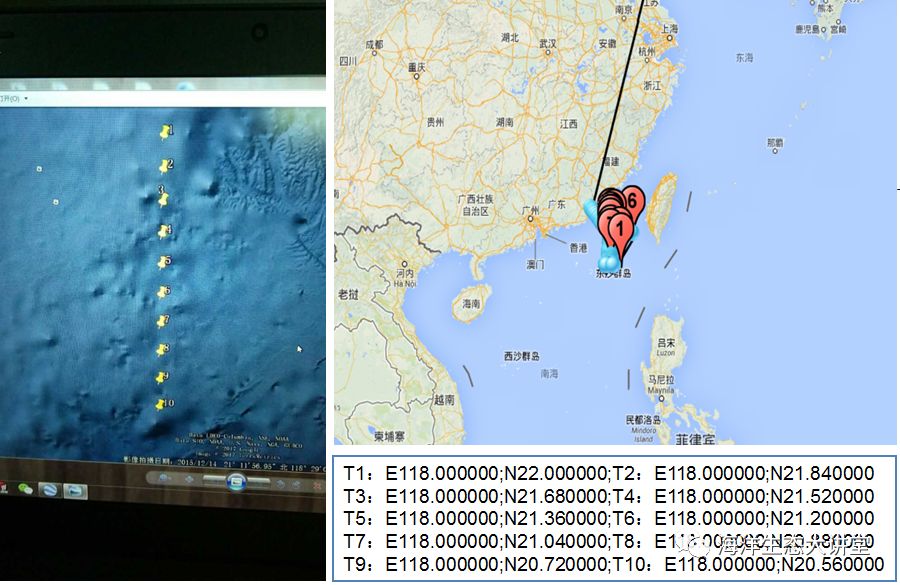
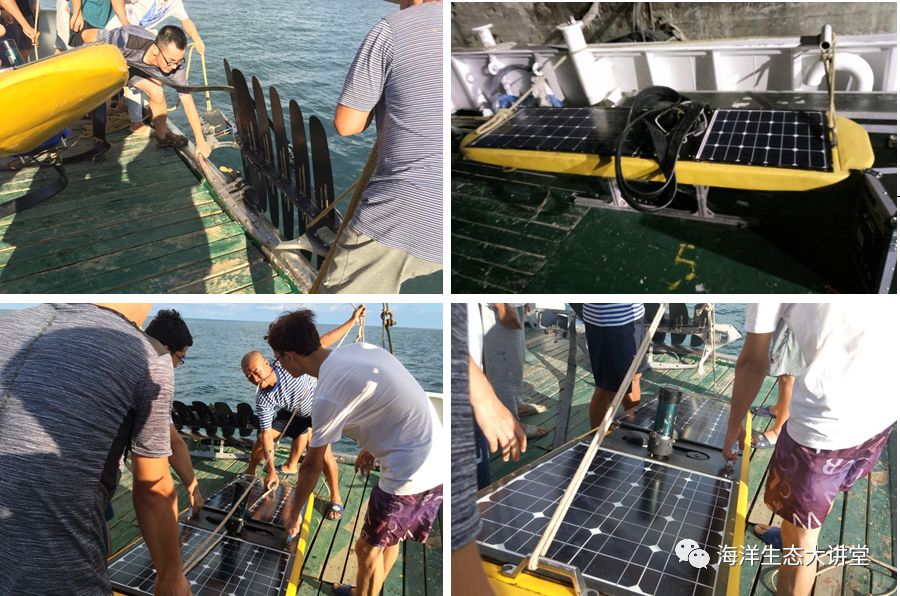
当时课题组成员与见证专家在南海布放时候的照片如下:

黑珍珠 波浪滑翔器在南海运行期间 经历了3次台风。
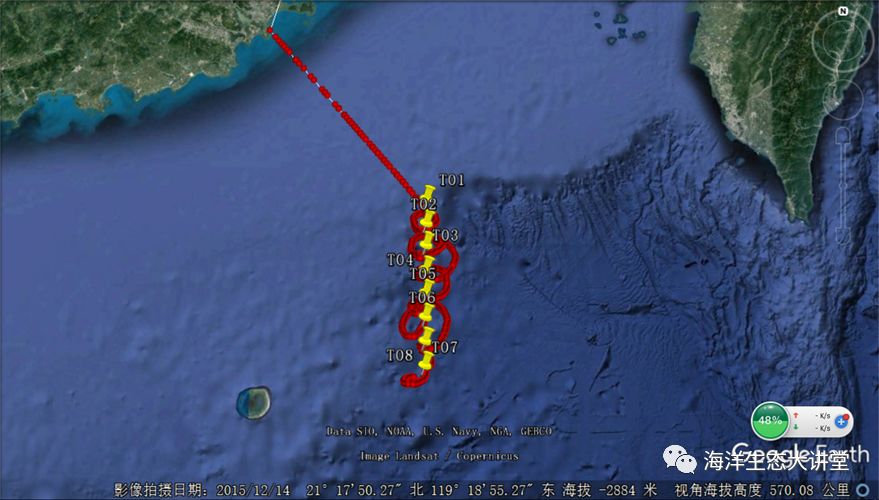
如下是波浪滑翔器设定路径和航行轨迹图:
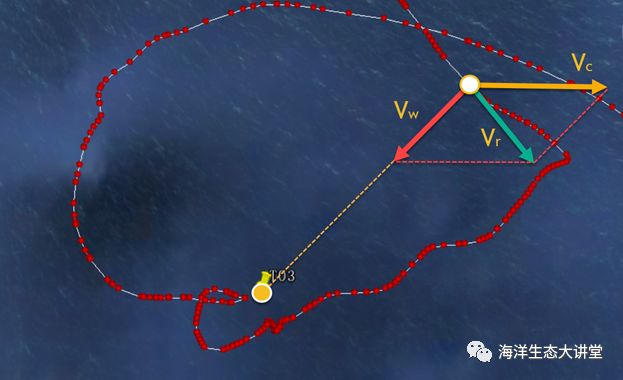
波浪滑翔器努力克服台风过程中海流的影响朝向自己的目标点前进。
这里要说的是,南海极端海况台风测试的波浪滑翔器安装了测波传感器和螺旋桨推进器,具有较高的抗流能力。
波浪滑翔器在这个过程中,实时测量波浪数据。
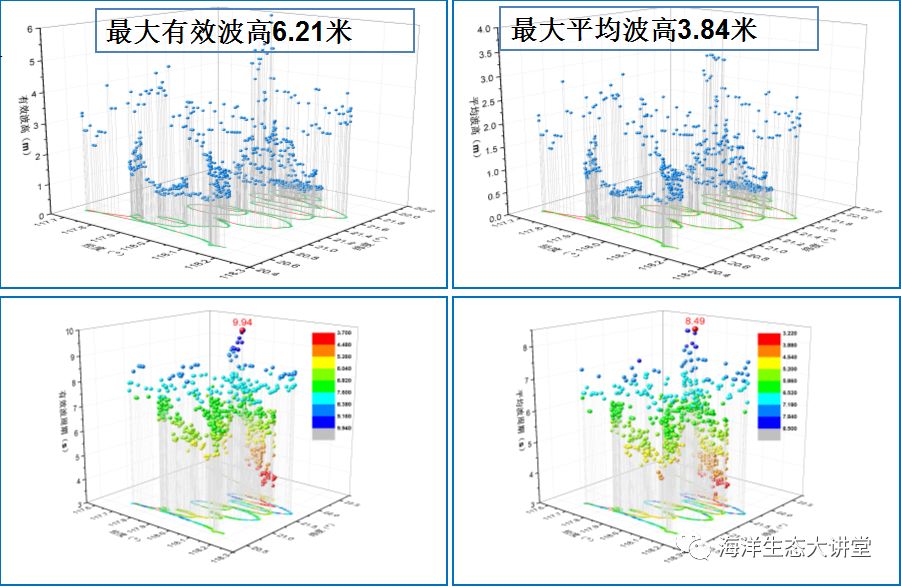
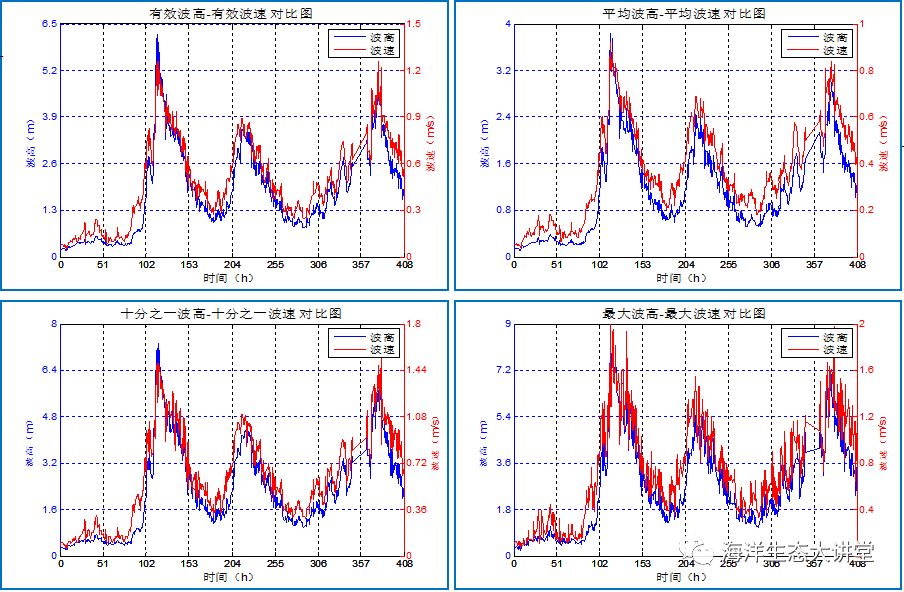
三次台风过程中,测得的最大有效波高6.21米。最大平均波高3.84米。
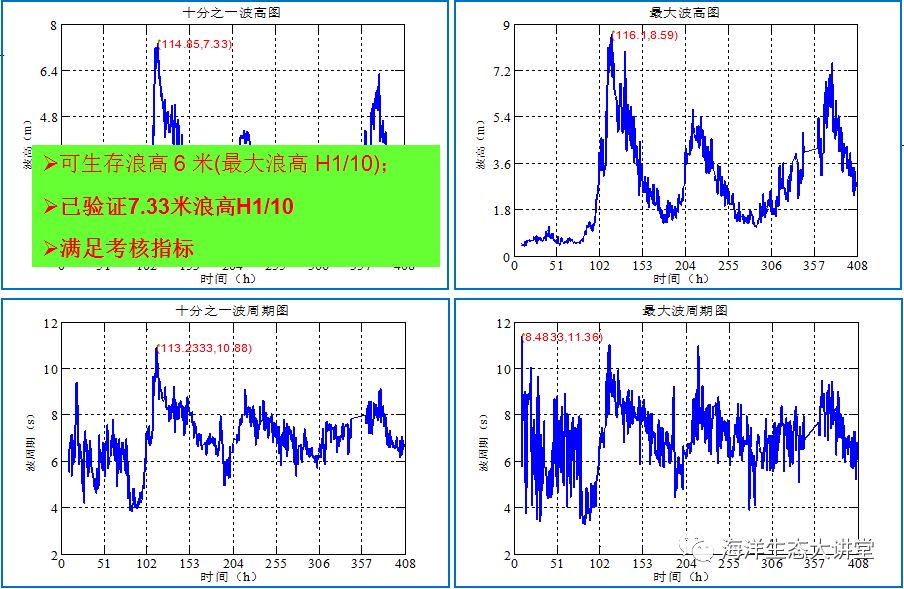
测得的十分之一波高是7.33米,最大波高8.59米。波浪滑翔器经历了最大波高8.59米。上述波浪数据是 波浪滑翔器自己测量出来的。
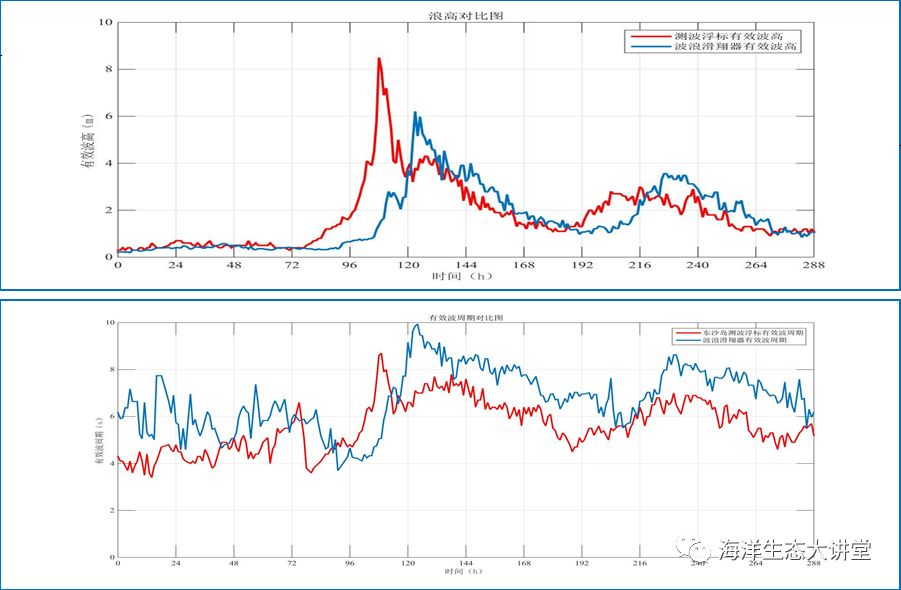
此外,我们找到了台湾锚系浮标的测波数据,并将台湾锚系浮标测量的波浪数据与波浪滑翔器的波浪数据进行了比对。
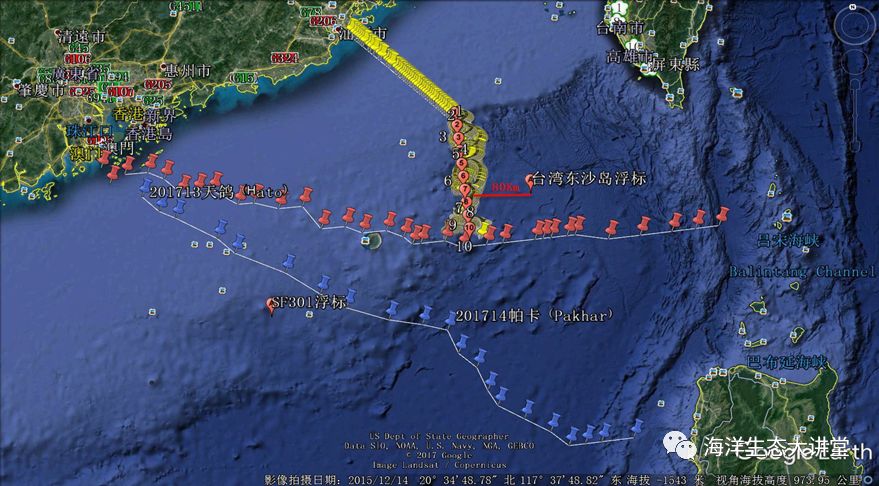
台湾东沙岛的锚系浮标距离波浪滑翔器80公里。此外,台风路径是从东南向西北行进,所以,波浪滑翔器测得的波浪数据峰值和周期都存在延后。
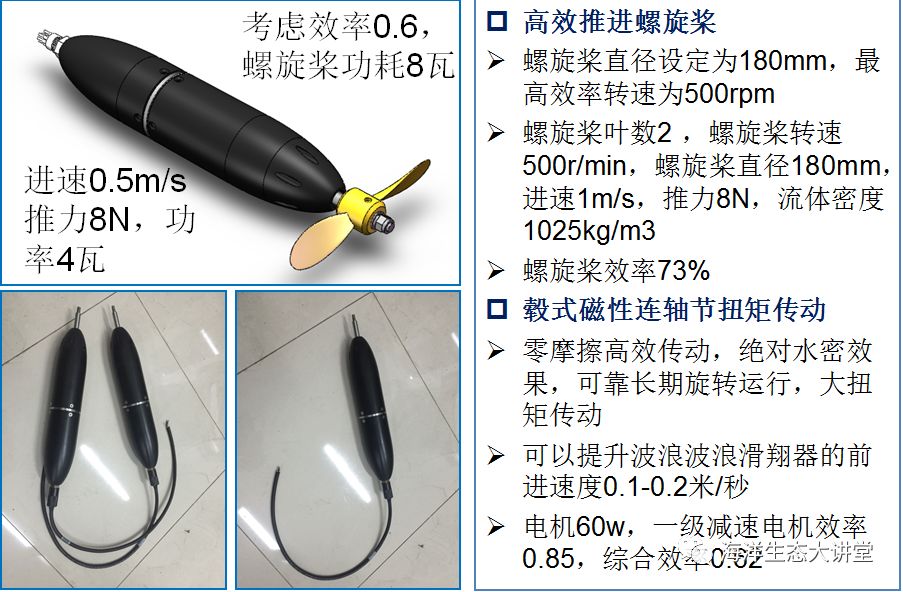
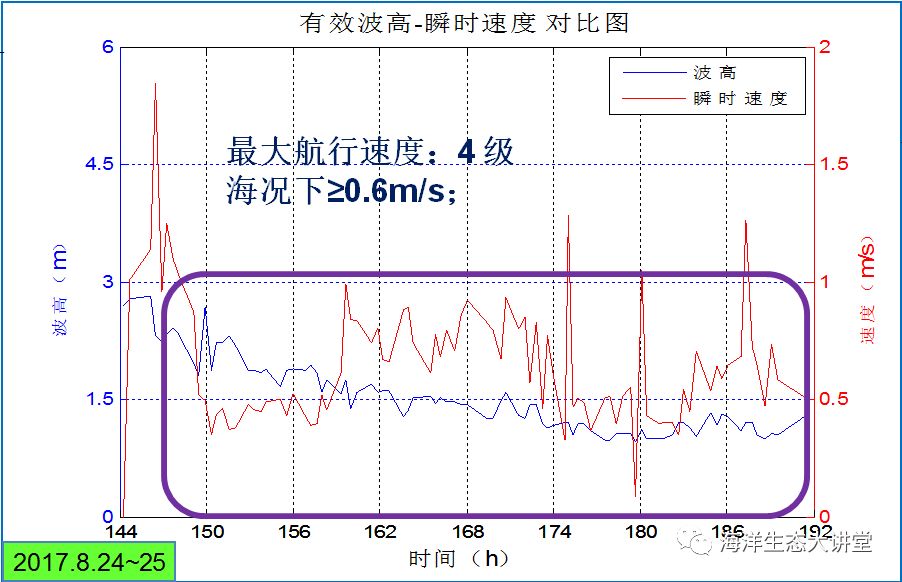
南海极端海况测试的波浪滑翔器安装有螺旋桨辅助推进模块,可以把富裕的太阳能电能用于前向动力推进。波浪滑翔器是通过将波浪起伏转换为前向推进的装置,波浪滑翔器的前进速度与海况有关系,更准确地说,前进速度与波浪的周期和幅值有关系。
这是实测波高与前近速度的关系曲线。1级海况下可以实现0.25米/秒的前进速度。
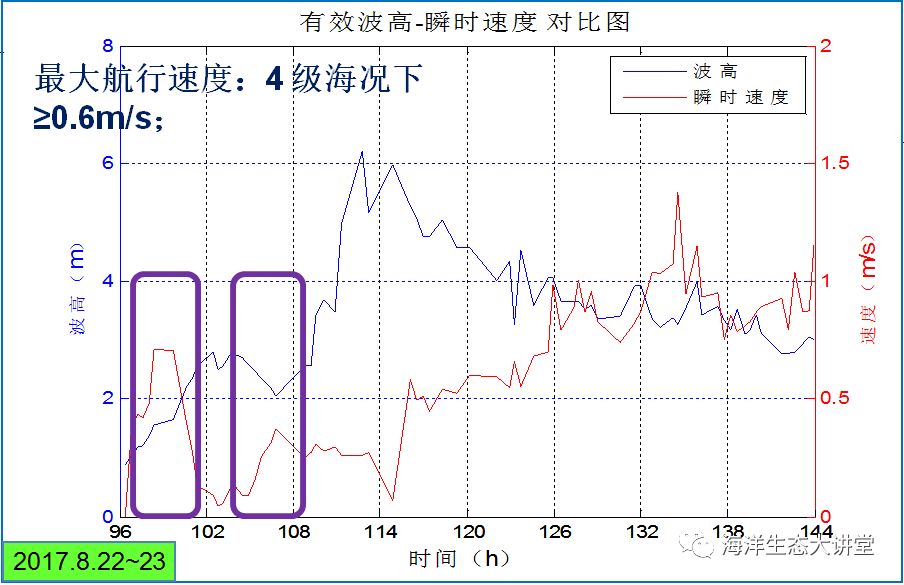
4级海况下可以实现0.6米/秒的前进速度。
南海极端海况测试的波浪滑翔器搭载了ADCP进行流速测量。
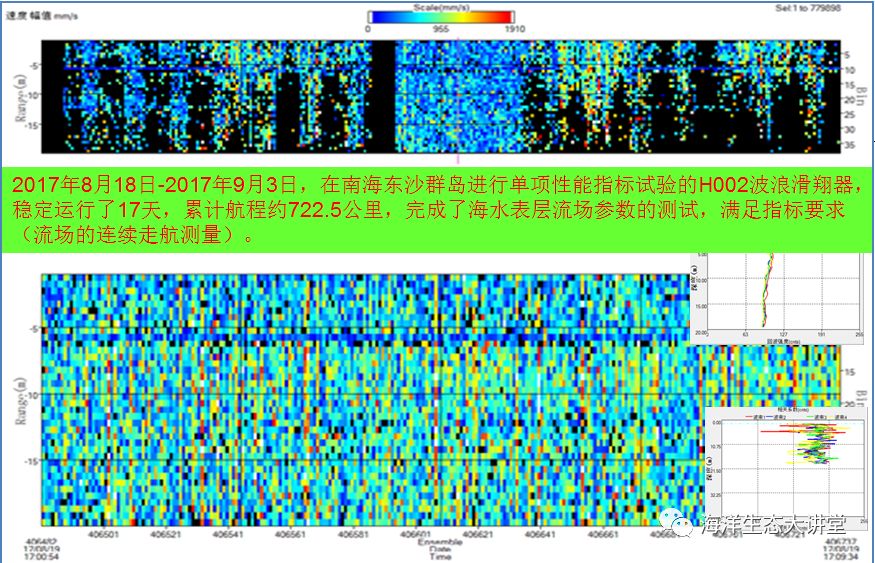
2017年8月18日-2017年9月3日,在南海东沙群岛进行单项性能指标试验的H002波浪滑翔器,稳定运行了17天,累计航程约722.5公里,完成了海水表层流场参数的测试,满足指标要求(流场的连续走航测量)。
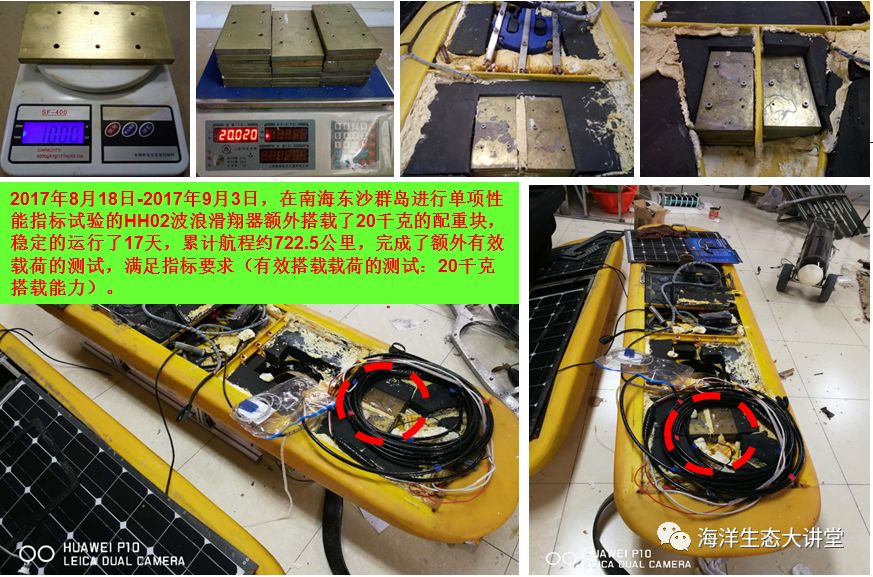
2017年8月18日-2017年9月3日,在南海东沙群岛进行单项性能指标试验的HH02波浪滑翔器额外搭载了20千克的配重块,稳定的运行了17天,累计航程约722.5公里,完成了额外有效载荷的测试,满足指标要求(有效搭载载荷的测试:20千克搭载能力)。

“黑珍珠”波浪滑翔器先后经历两次台风(201713“天鸽”(Hato),201714“帕卡”(Pakhar)),于2017年9月3号被过路科考船(科学号,栾振东研究员)回收带回来。
2017年8月18日-2017年9月3日,在南海东沙群岛进行单项性能指标试验的HH02波浪滑翔器,前后经历了三次台风(201713“天鸽”(Hato),201714“帕卡”(Pakhar),201716“玛娃”(MAWAR)),稳定运行了17天,累计航程约722.5公里,完成了可生存浪高的测试,经历的最大浪高H1/10为7.33米,满足指标要求(可生存浪高6米(最大浪高H1/10))。
2017年11月27日12:30 ~ 11月28日12:30<br>在青岛进行了单项性能指标的试验,只要是测试波浪滑翔器的位置保持和路径跟踪的功能。
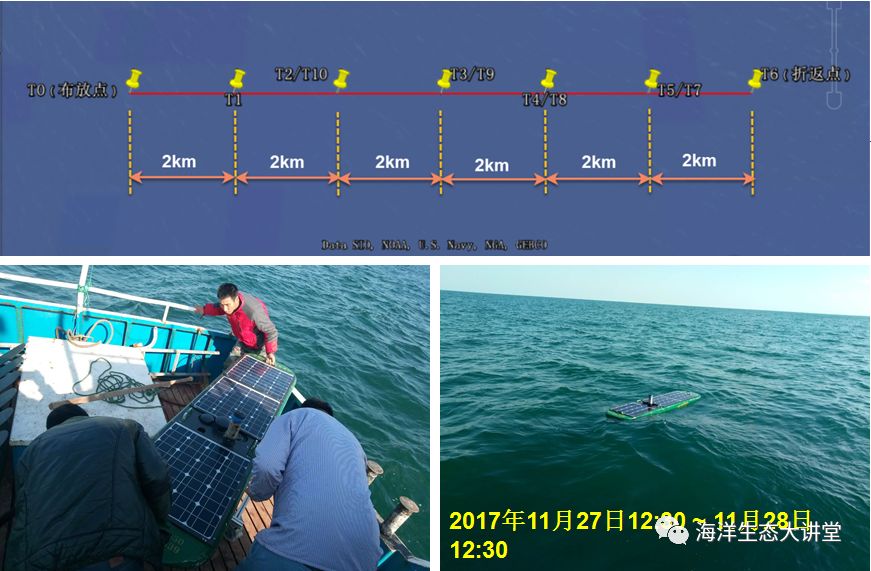
这是青岛单项指标试验时候布放照片。
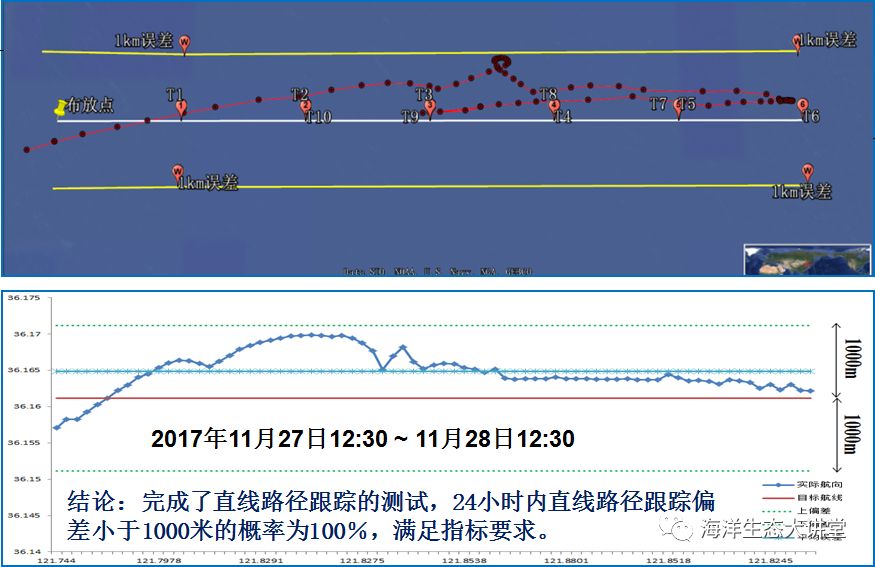
这是走航路径。
第三方见证试验,到了十月份之后,海况变得恶劣,同时北方天气变冷,海试试验做的非常艰辛。
同时,期间也是经常遇到渔民破坏的情况,试验确实不容易。好在,经过大家努力,海上验收试验逐项完成检查。
数据的有效性、真实性以及考核指标的验证方法都得到了专家的确认。
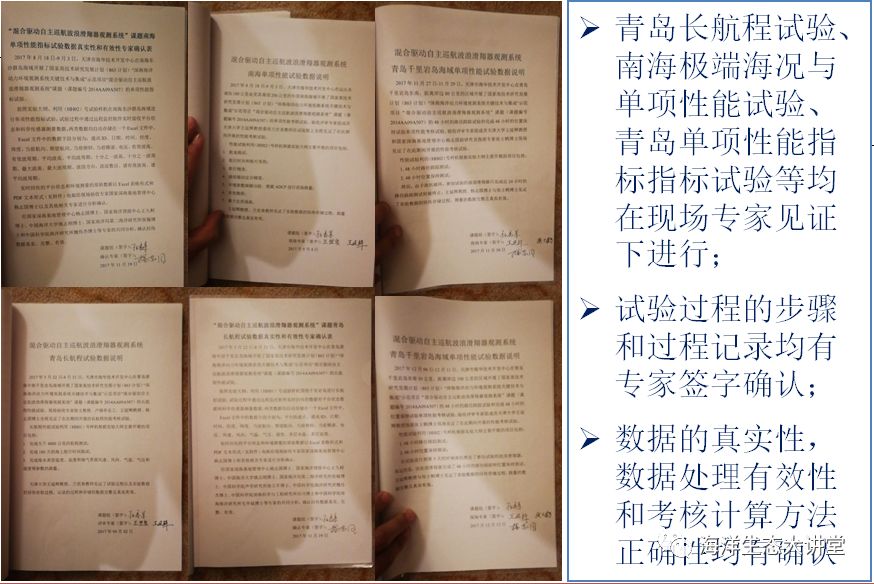

2017年11月6日,受21世纪议程管理中心委托,在天津组织召开了课题海试现场验收会,会议成立了评审专家组,听取了课题组的汇报,审阅了提交的海上试验验收报告及试验过程记录;进行了现场评分,评分结果为94分;验收专家组一致同意海上试验通过验收。