微信公众号
山东省智能感知芯片与系统重点实验室

作为深海探索与海洋工程的关键智能装备,水下软体机器人在海洋监测、深海探测及水下作业场景中发挥着至关重要的作用。当前,水下装备常用的形状记忆合金(SMA)驱动系统,普遍存在散热效率偏低、变形幅度有限与响应速度较慢等技术瓶颈。为此,山东省智能感知芯片与系统重点实验室李俊漾副教授与温琦教授团队,联合中国科学技术大学胡奇强教授团队、厦门大学高立波教授团队与香港城市大学张奇博士团队,提出了一种基于晶格增强Lattice‑N5的SMA软体驱动器设计方法。该研究不仅为水下仿生机器人的高性能驱动提供了全新技术路径,也充分展现了晶格增强型SMA驱动器在水下软体装备领域的广阔应用前景。相关研究工作以“Design of a Lattice‑Reinforced Shape Memory Alloy Actuator for Underwater Soft Robots”为题发表在Soft Robotics上,实验室硕士研究生李辽、王世杰为共同第一作者。
本文提出的SMA驱动器采用Lattice‑N5晶格结构,由两层SMA丝与一组超弹性丝构成,可实现高效弯曲驱动与快速弹性复位,从而精准完成驱动器的变形与恢复,实现水下软体机构的稳定驱动(见图 2)。仿真与实验结果表明,该晶格增强SMA驱动器展现出良好的热响应与复位性能,在周期性驱动测试中能够快速进入稳定状态,变形曲率差较无晶格结构最高提升390.59%,表明该驱动器具备优异的动态性能,适用于水下软体机器人的工程实践(见图 3)。该SMA驱动器具有显著的加热响应速度与散热效率,可在水下环境中快速完成弯曲与复位,保证仿生机构稳定运动,进而实现高效推进与灵活姿态调整(见图 4)。空气中的循环驱动实验结果显示,Lattice‑N5驱动器能够在更短周期内达到稳定曲率,相同驱动条件下的有效变形量远优于无晶格结构,具备更稳定的往复驱动能力(见图 5)。水下动态测试进一步证明,该驱动器在水环境中仍可快速进入稳定变形阶段,在不同频率与占空比下均保持更大曲率差与更快响应速度,完全满足水下高频驱动需求(见图 6)。
为进一步验证系统的实际应用能力,本团队将该驱动器集成至仿生水母机器人并开展水下运动试验,搭载Lattice‑N5驱动器的仿生水母机器人表现出优异的水下环境适应性,能够稳定执行驱动指令,协调且准确地完成垂直游动、水平游动与转向动作,运动速度较传统方案最高提升111%(见图 7)。同时,机器人可集成柔性压力传感器,实现水下水压监测与运动状态感知,通过信号变化准确识别不同运动模式,顺利完成水下监测任务,这一结果充分证实了该技术在水下软体机器人与海洋环境探测领域的实用价值和广阔应用前景(见图 8)。
论文链接:
https://sage.cnpereading.com/paragraph/article/?doi=10.1177%2F21695172251366120
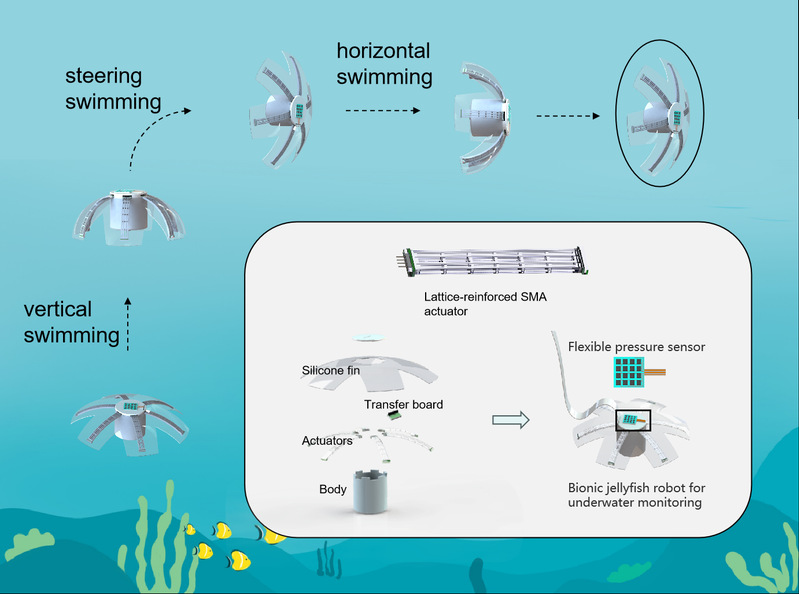
图 1晶格增强型形状记忆合金驱动器及其仿生水母机器人。SMA,形状记忆合金。
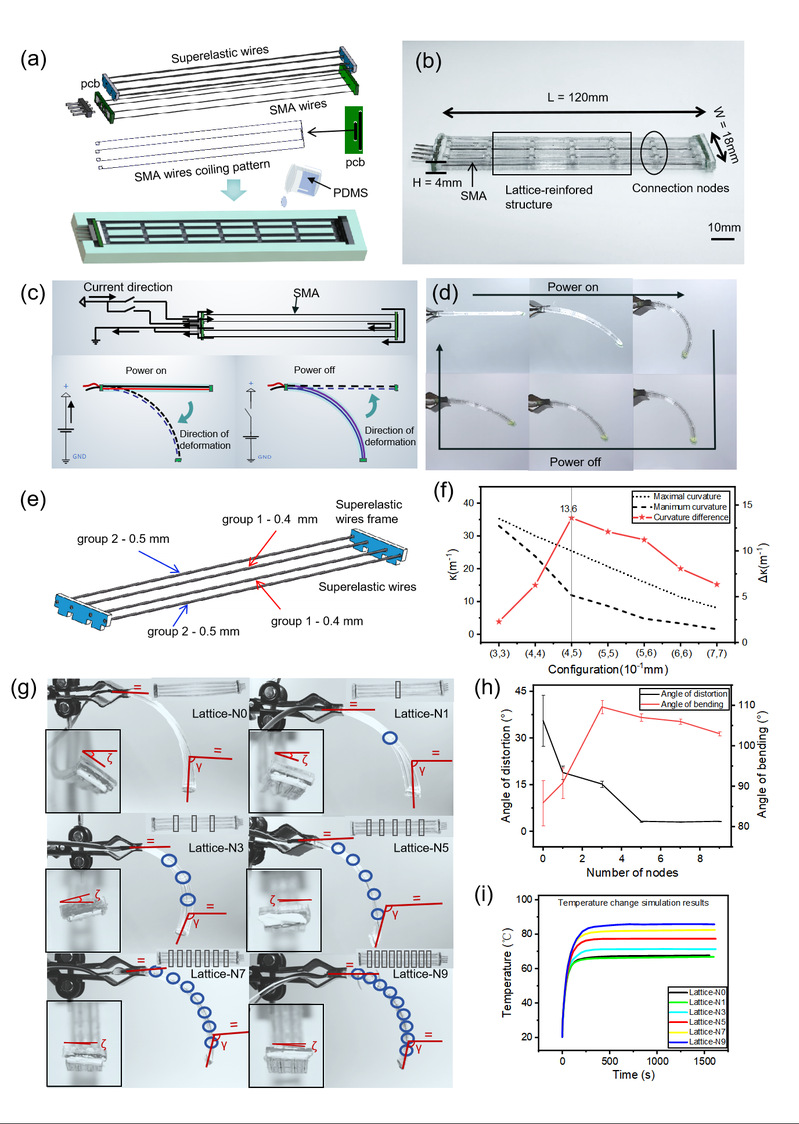
图 2晶格增强型SMA驱动器的制备工艺与工作机理。(a) 驱动器的内部结构与浇注过程。(b) 晶格增强型SMA驱动器的实物细节。(c) 驱动器的变形原理。(d) 驱动器的一个变形周期。(e) 超弹性丝分组示意图。(f) 不同超弹性丝组合下驱动器的曲率。(g) 基于不同连接节点数量驱动器的实验。(h) 不同连接节点数量下驱动器的变形角度。(i) 不同连接节点数量下驱动器的温度变化。κ,驱动器的曲率变化;Δκ,驱动器的曲率差值;γ,弯曲角;ζ,扭曲角;L,长度;Lattice‑Nx,具有不同数量 (x) 连接节点的晶格增强型 SMA 驱动器;H,高度;SMA,形状记忆合金;W,宽度。
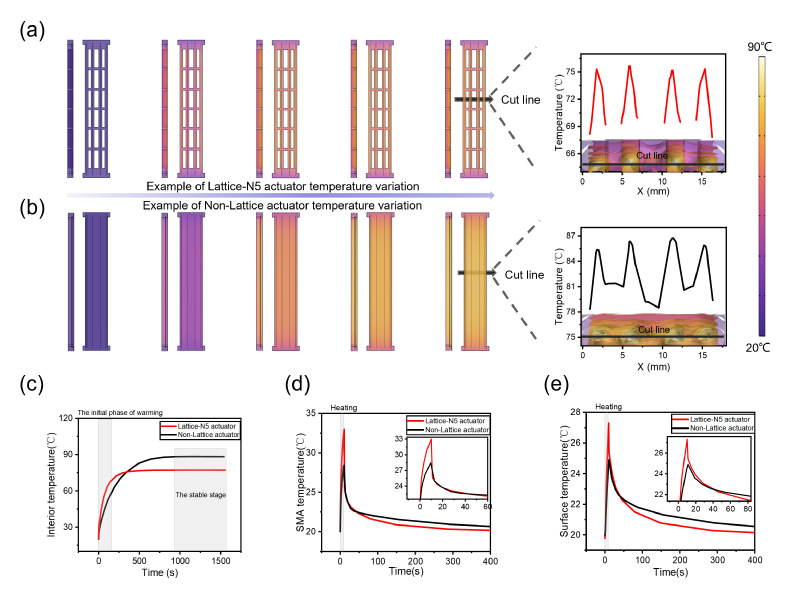
图 3不同驱动器的散热性能分析。(a) Lattice‑N5驱动器的温度变化过程及切割线处温度。(b) 无晶格结构驱动器的温度变化过程及切割线处温度。(c) 两种驱动器的持续加热过程。(d) 两种驱动器在加热 10 秒并冷却时的内部温度变化过程。(e) 两种驱动器在加热 10 秒并冷却时的表面温度变化过程。Lattice‑N5,具有5个连接节点的晶格增强型SMA驱动器;nonlattice,无晶格结构的驱动器。
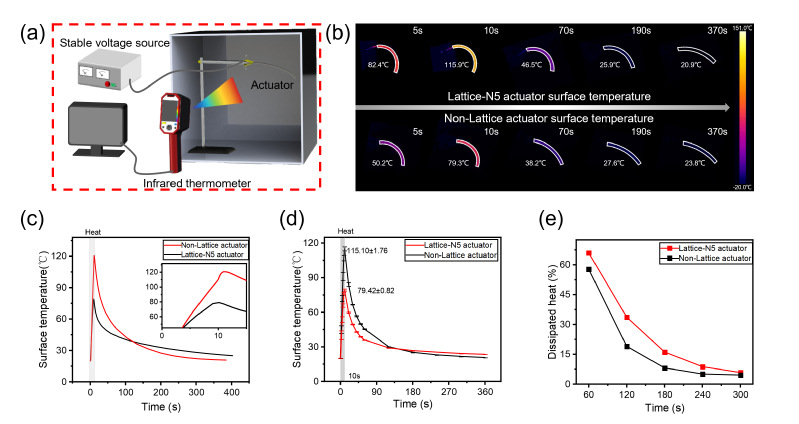
图 4散热性能实验。(a) 实验装置。(b) 驱动器的表面温度变化。(c) 仿真得到的表面温度变化。(d) 红外测温仪测得的表面温度变化。(e) 两种驱动器的散热能力对比。
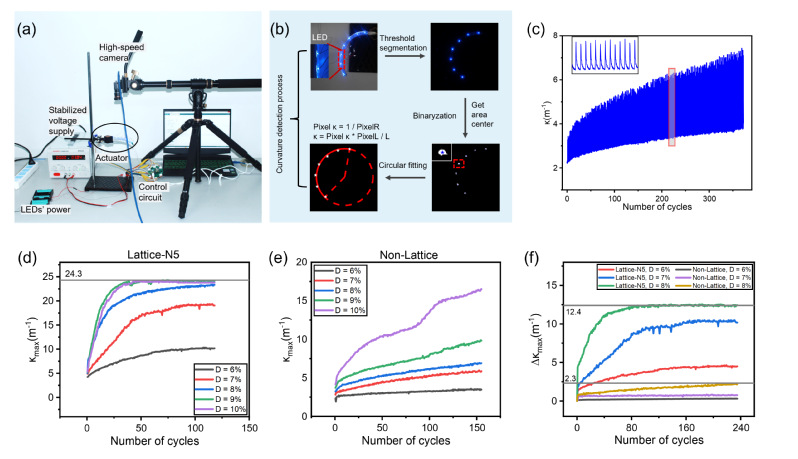
图 5空气中驱动器的循环变形分析。(a) 实验装置。(b) 曲率检测过程。(c) 周期信号作用下 Lattice‑N5 驱动器的曲率变化。(d) Lattice‑N5驱动器的最大曲率变化。(e) 无晶格结构驱动器的最大曲率变化。(f) 每个周期的曲率差值记录。LED,发光二极管;κmax,驱动器的最大曲率。
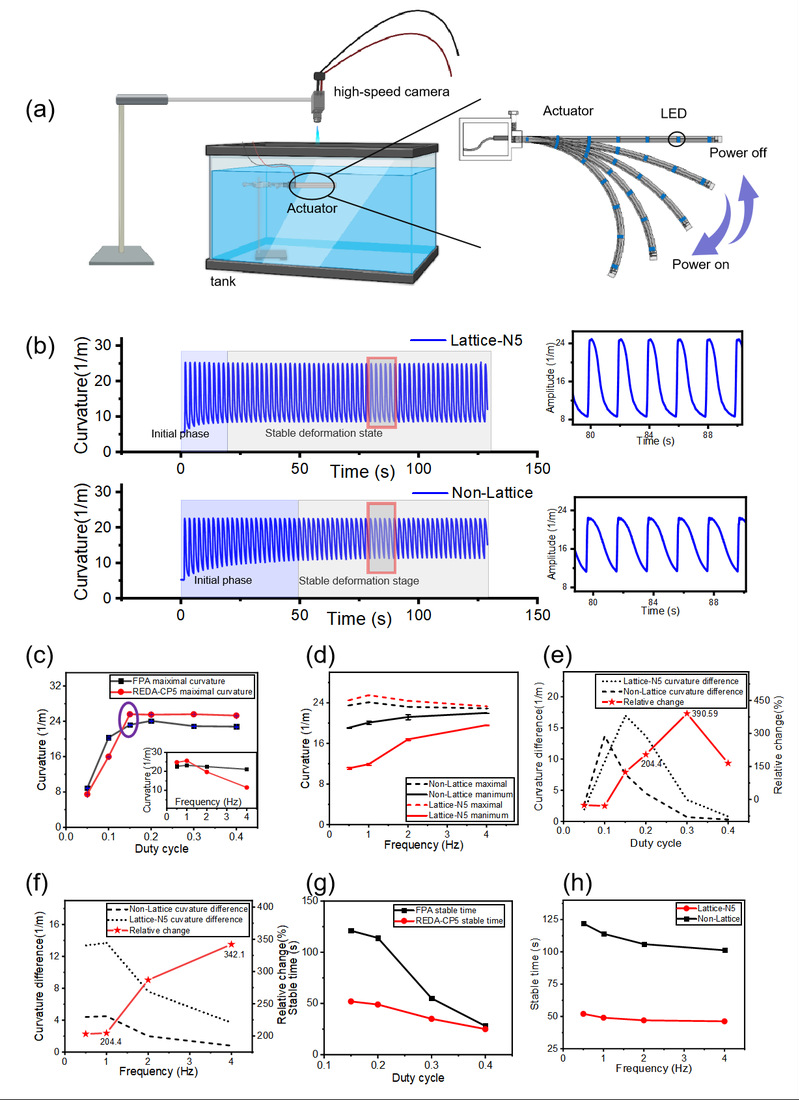
图 6 水下驱动器的循环变形性能分析。(a) 实验装置。(b) 循环变形中驱动器的曲率变化。(c) 不同占空比下稳定阶段驱动器的最大曲率。(d) 不同频率下稳定阶段驱动器的最大曲率与最小曲率。(e) 单个周期内的曲率差值。(f) 不同频率下单个周期内的曲率差值。(g) 不同占空比下达到稳定状态的时间。(h) 不同频率下达到稳定状态的时间。
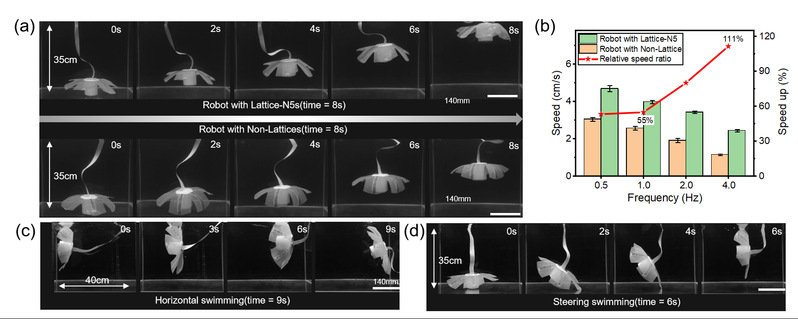
图 7 在仿生水母机器人中的应用。(a) 搭载不同SMA驱动器的机器人垂直游动情况。(b) 两种机器人在不同频率下的游动速度。(c) 机器人的水平游动。(d) 机器人的转向游动。
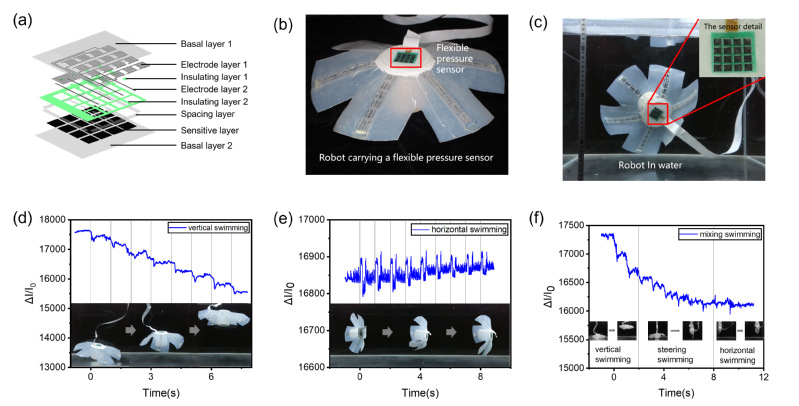
图 8 水母机器人的运动状态监测。(a) 柔性压力传感器结构。(b) 搭载柔性压力传感器的水母机器人结构。(c) 水母机器人执行水下状态监测。(d) 水母机器人垂直游动时传感器的归一化电流曲线。(e) 水母机器人水平游动时传感器的归一化电流曲线。(f) 水母机器人混合游动时传感器的归一化电流曲线。ΔI/I0,传感器的灵敏度。