微信公众号
山东省智能感知芯片与系统重点实验室

山东省智能感知芯片与系统重点实验室李俊漾与温琦教授团队联合中国科学技术大学胡奇强与张世武教授团队,提出了一种基于双向形状记忆合金(SMA)执行器的采水器设计方法。该研究不仅为深海水样采集提供了前沿的解决方案,同时也展示了SMA执行器在海洋装备中应用的潜力。相关研究工作以“Design of a novel deep-sea hydrophore based on bidirectional SMA actuators”为题发表在Science China Technological Sciences上。
本文提出的SMA执行器采用三明治结构,由两层SMA丝和一层高弹丝(HEW)构成,可实现两个方向的弯曲,从而高效地开启或闭合释放钩,实现释放系统的精准触发与复位(见图2)。仿真与实验结果表明,该SMA执行器展现出了良好的复位性能,在对执行器进行100次耐久性测试后,其核心性能的退化率低于3%,这表明该执行器具备足够的冗余度,适合应用于采水器的工程实践(见图3)。SMA执行器具有显著的爆发力,可以克服机构阻力,确保释放钩顺利打开,从而快速而精准地释放采水瓶(见图4)。为进一步验证系统的应用能力,本团队在黄海海域开展了实地试验。搭载该释放系统的单瓶采水器样机展现了出色的环境适应性,能够稳定地执行指令,协调且准确地完成采水瓶的释放与闭合,成功获取了目标水样(见图5)。这一结果充分证实了该技术在深海原位采样领域的实用价值与广阔前景。
论文链接:https://www.sciengine.com/SCTS/doi/10.1007/s11431-025-3250-8
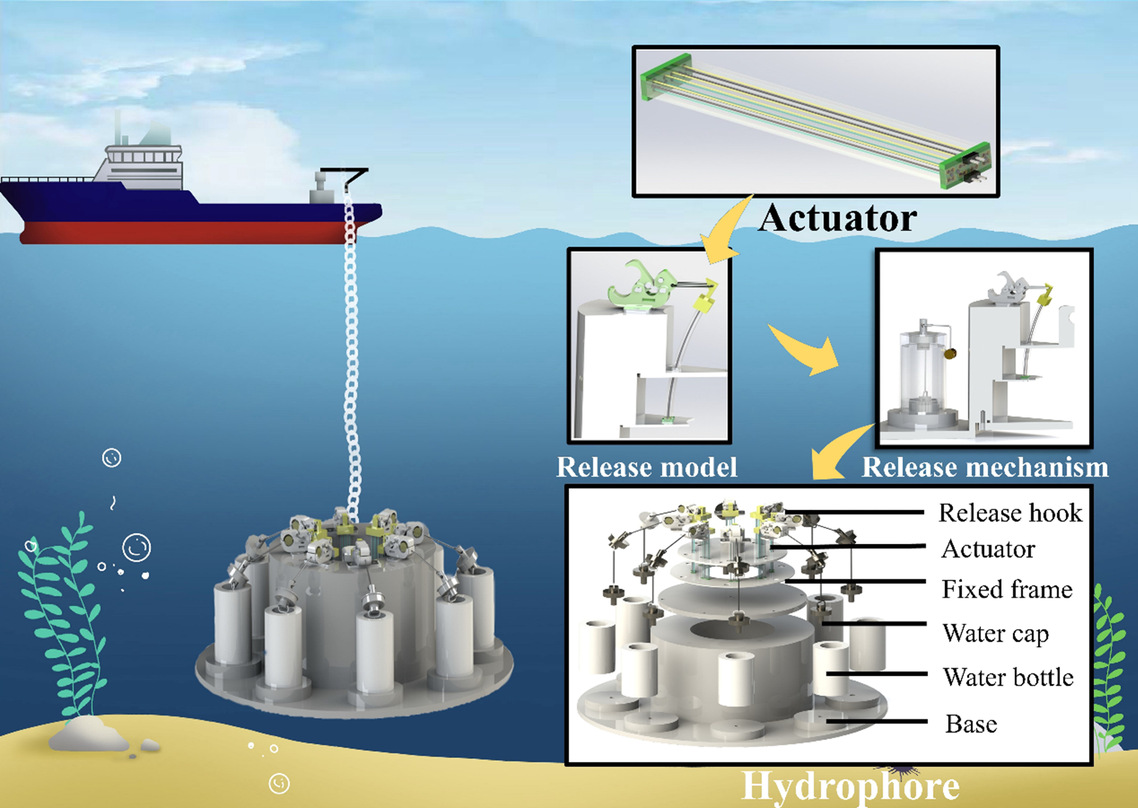
图1 基于SMA执行器的海洋采水器概念图及其工作过程
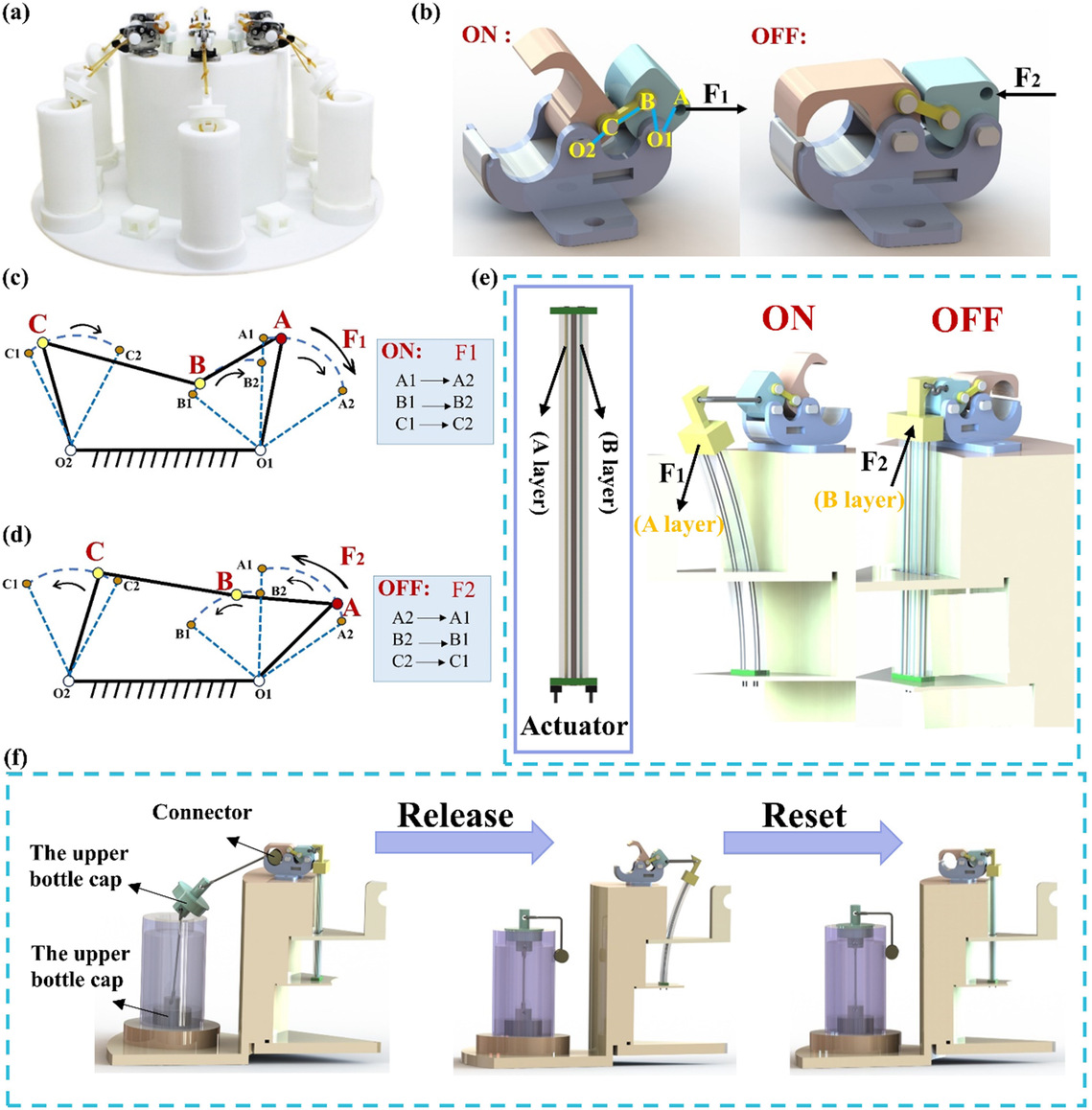
图2 采水器的设计。(a) 采水器,包括SMA执行器、释放钩和采水瓶。(b) 释放钩的两种稳定状态:打开和关闭。(c) 释放钩在打开状态下运动简图。(d) 释放钩在关闭状态下运动简图。(e) 释放系统的开合示意图。(f) 单个采水器模型的释放操作示意图。
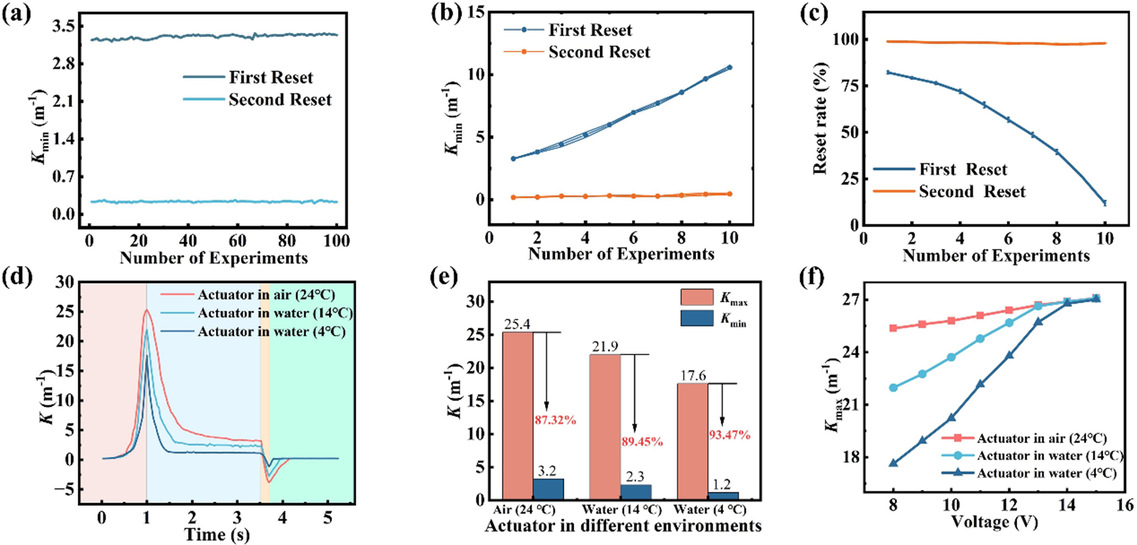
图3 SMA执行器的性能评估。(a) 在t2 = 3 s时,SMA执行器在第一次和第二次复位后的Kmin。(b) 在t2 = 0 s时,SMA执行器在第一次和第二次复位后的Kmin。(c) 在t2 = 0 s时,SMA执行器在第一次和第二次复位后的复位率。(d) SMA执行器在不同环境下的弯曲结果。(e) 不同环境下SMA执行器的复位率。(f) 在不同环境下,SMA执行器的Kmax随电压(U1)变化的情况。
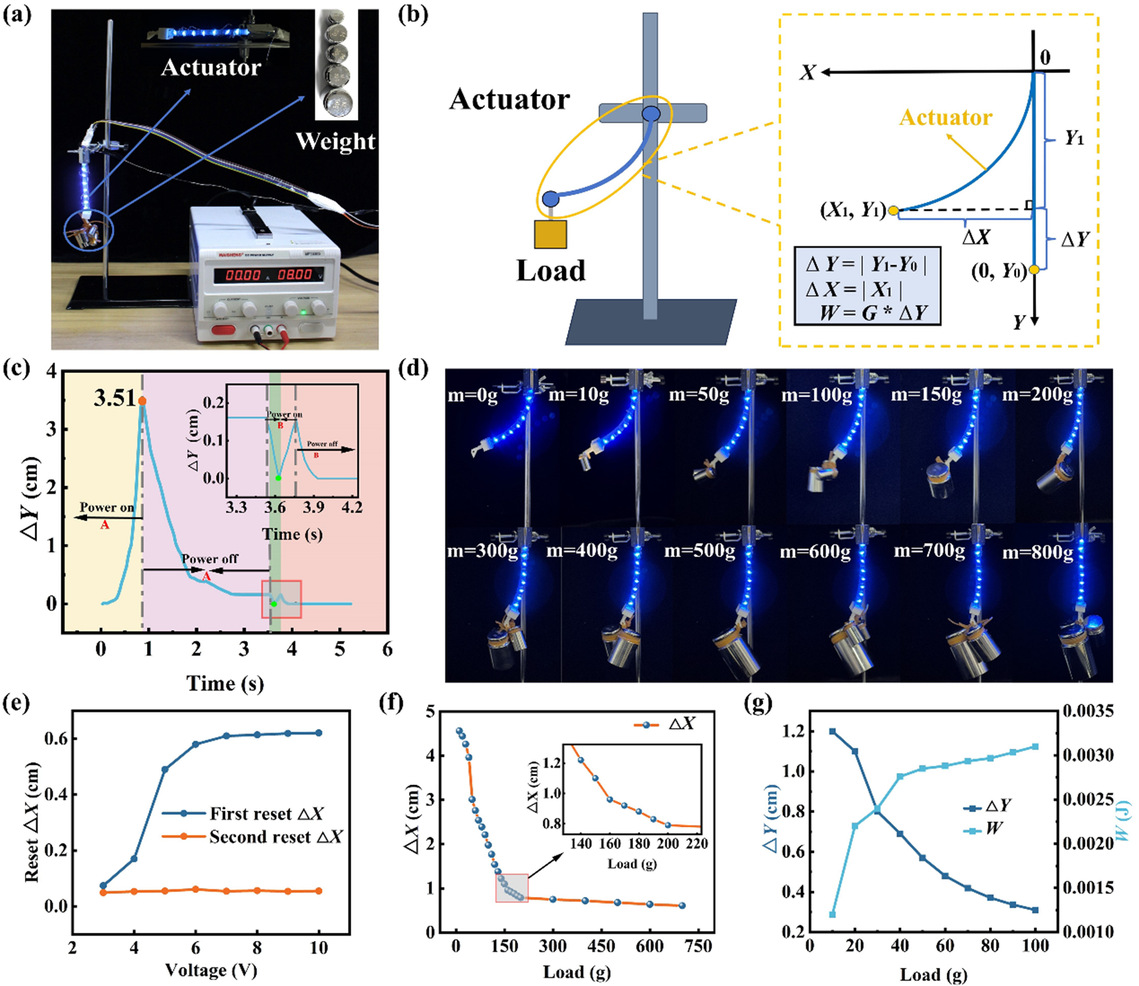
图4 SMA执行器的负载性能。(a) SMA执行器驱动位移测试平台。(b) SMA执行器驱动位移分解。(c) 在无负载下SMA执行器驱动位移(ΔY)的变化。(d) 在不同负载下SMA执行器的弯曲运动。(e) 在不同驱动电压(U1)和无负载条件下SMA执行器的驱动位移(ΔX)的变化。(f) 在各种负载下SMA执行器最大驱动位移(ΔX)的变化。(g) 在不同负载下,SMA执行器最大驱动位移(ΔY)和W的变化。
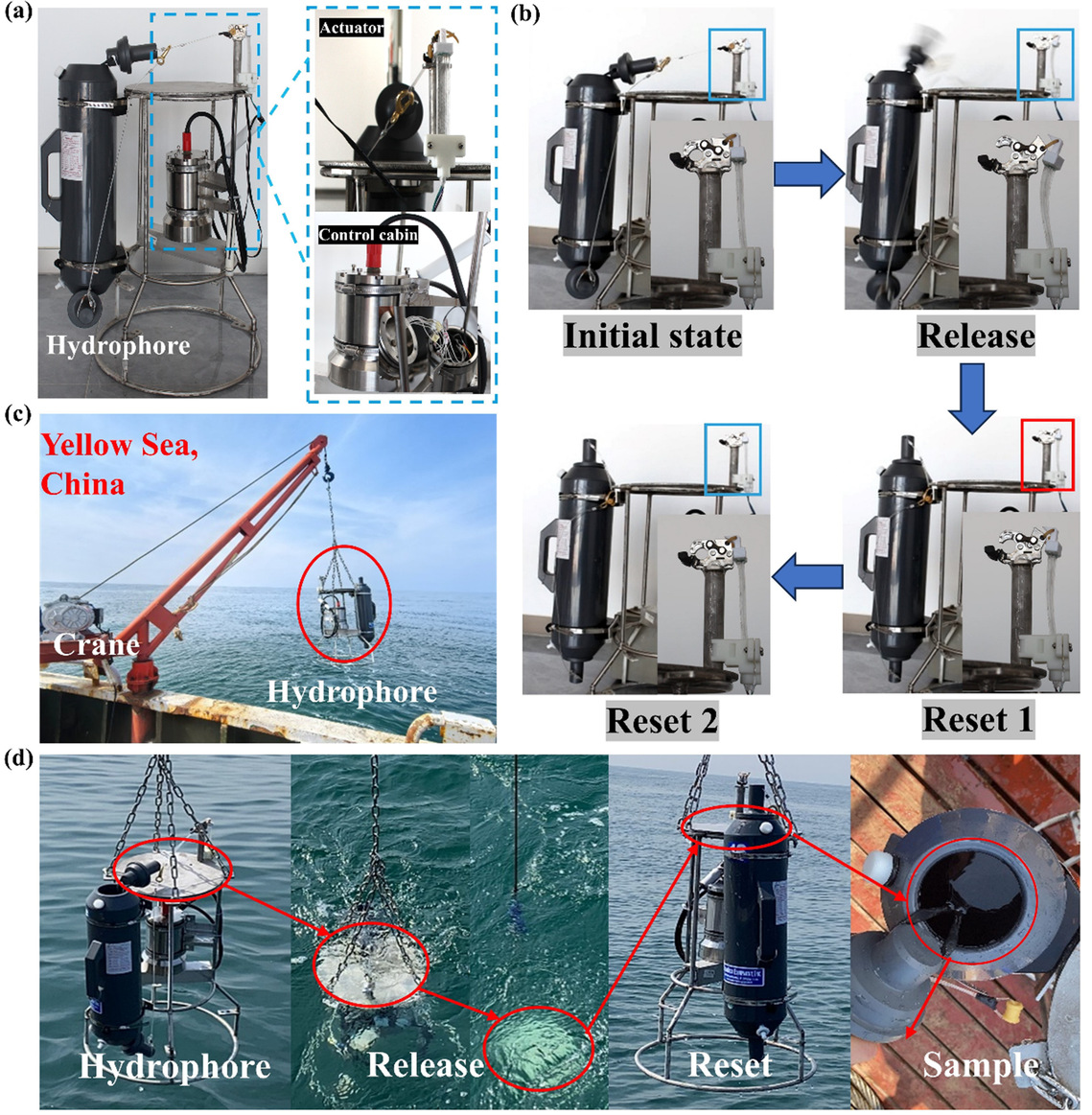
图5 采水器实地测试。(a)采水器样机。(b) 采水器样机释放测试。(c) 采水器样机实地测试平台。(d) 采水器样机的水下采样过程。